上海智位机器人股份有限公司 沪ICP备09038501号-4

智能助行器

发布时间:2021-05-31
研究目的
身边还有很多朋友和亲人们,他们也遇到不能时时刻刻陪伴在老人和康复者身边,请护工对某些家庭来说,又是一场额外的负担,为了让他们增加身体活动量和肌群耐力,辅助老年人行走和生活的助行器应运而生。
“能坐就不躺,能站就不要坐,能走尽量走,能自己来就自己来!”这句话想必是很多老年人最真实的心理活动。
综上所述,制作一款能改善行走不便的老年人和辅助康复患者的助行器,解决提升他们的生活质量及内心的呐喊!
代码
/*!
* MindPlus
* uno
*
*/
#include <DFRobot_URM10.h>
#include <DFRobot_HuskyLens.h>
#include <DFRobot_Libraries.h>
// 动态变量
volatile float mind_n_BeiAnXia, mind_n_AnNiu;
// 函数声明
void DF_AnNiu();
void DF_ChaoShengBo();
// 创建对象
DFRobot_HuskyLens huskylens;
DFRobot_Servo360 servo360_11;
DFRobot_Servo360 servo360_12;
DFRobot_URM10 urm10;
// 主程序开始
void setup() {
servo360_11.attach(11);
servo360_12.attach(12);
huskylens.beginI2CUntilSuccess();
huskylens.writeAlgorithm(ALGORITHM_FACE_RECOGNITION);
}
void loop() {
DF_AnNiu();
huskylens.request();
if (huskylens.isAppear(1,HUSKYLENSResultBlock)) {
if ((mind_n_BeiAnXia==4)) {
servo360_11.speed(0);
servo360_12.speed(0);
}
else if ((mind_n_BeiAnXia==1)) {
servo360_11.speed(20);
servo360_12.speed(-20);
}
if ((analogRead(A1)<20)) {
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
}
else {
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
}
}
// 自定义函数
void DF_AnNiu() {
mind_n_AnNiu = analogRead(A0);
if ((mind_n_AnNiu<600)) {
mind_n_BeiAnXia = 1;
}
if (((mind_n_AnNiu>=700) && (mind_n_AnNiu<800))) {
mind_n_BeiAnXia = 4;
}
}
void DF_ChaoShengBo() {
if (((urm10.getDistanceCM(4, 5))<150)) {
digitalWrite(6, HIGH);
delay(1000);
digitalWrite(6, LOW);
delay(1000);
}
else {
digitalWrite(6, LOW);
}
}步骤1 调查
通过走访当地几家三级医院,与护理师和理疗师的沟通。发现固定性的助行器虽然占用一定空间,比起折叠型的更加牢固,不易变形。在与李老师和卢老师商量以后,我们俩就开始了程序设计。
步骤2 编程


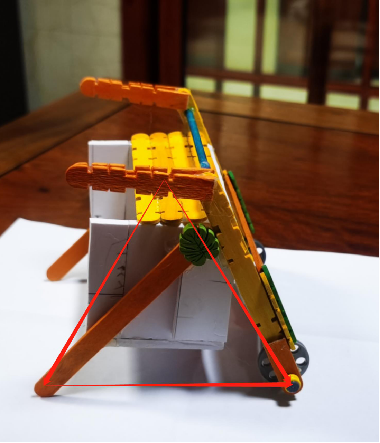
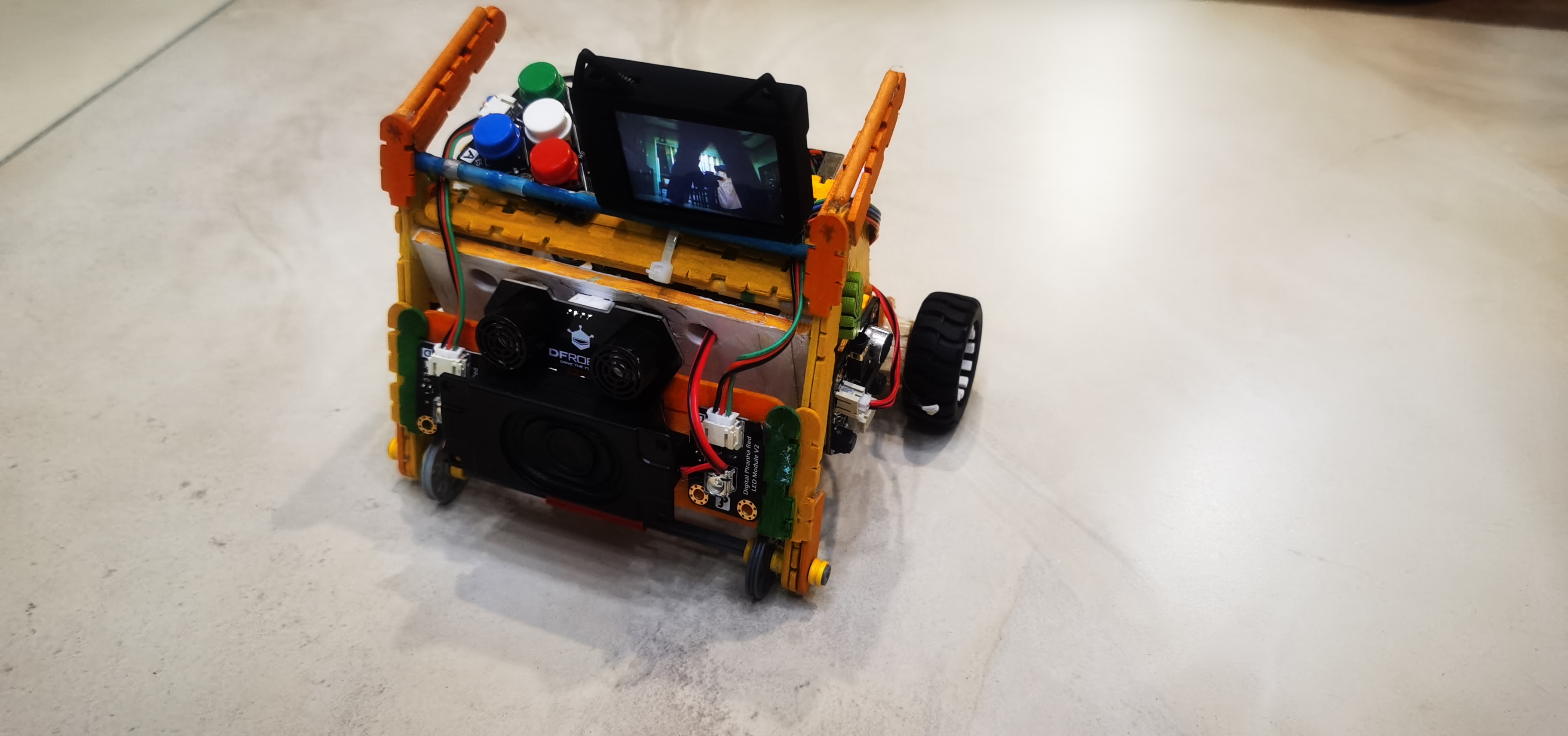
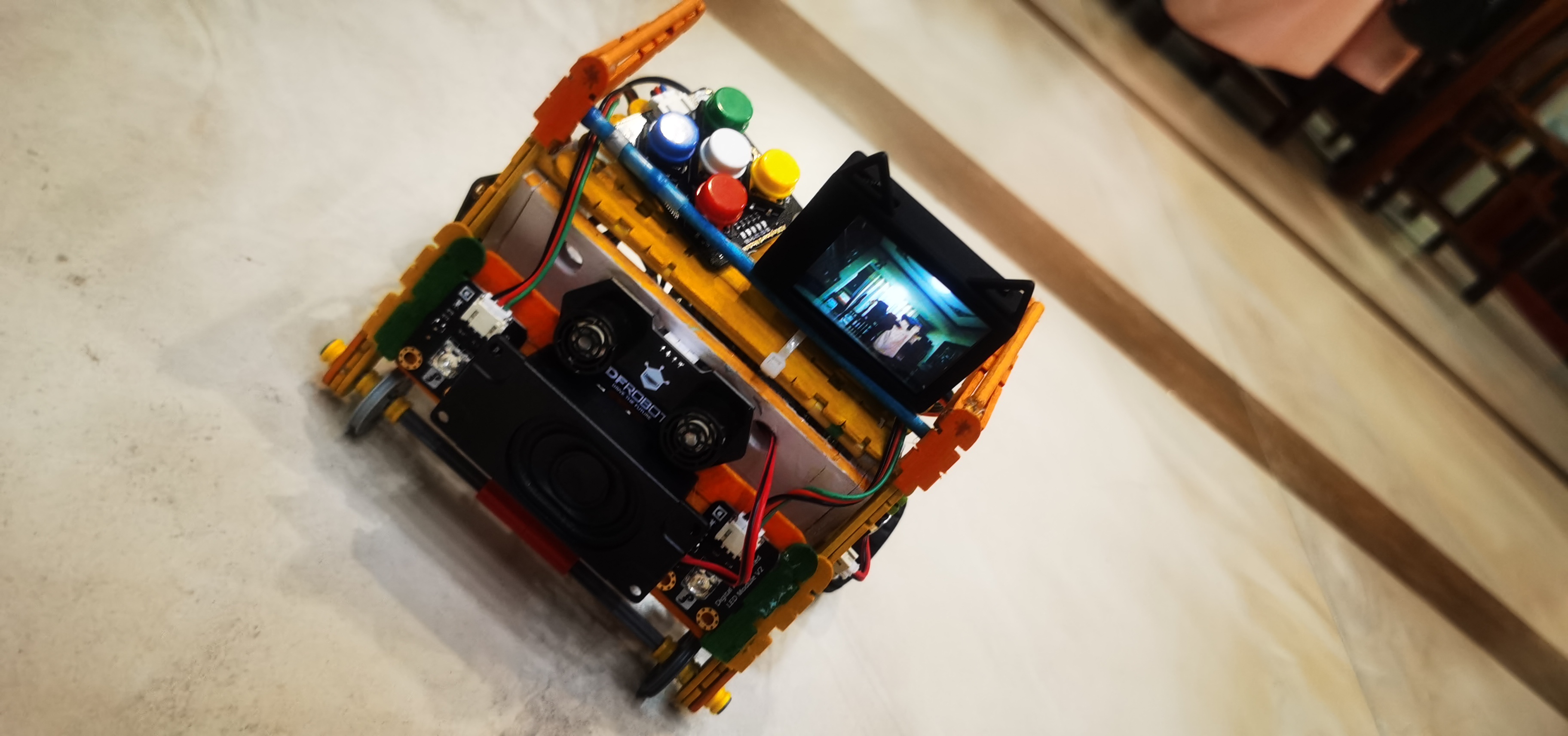
步骤3 制作
步骤4 烦恼
我和子迪怀着喜悦的心情,把助行器的模型带回学校。李老师检查以后,笑着问了我们几个问题:你们用手动一下模型设计得牢固吗?预留放主板的储存的空间够放吗? 此刻我和子迪都沉默了。虽然事与愿违,但还是要克服困难重新做。

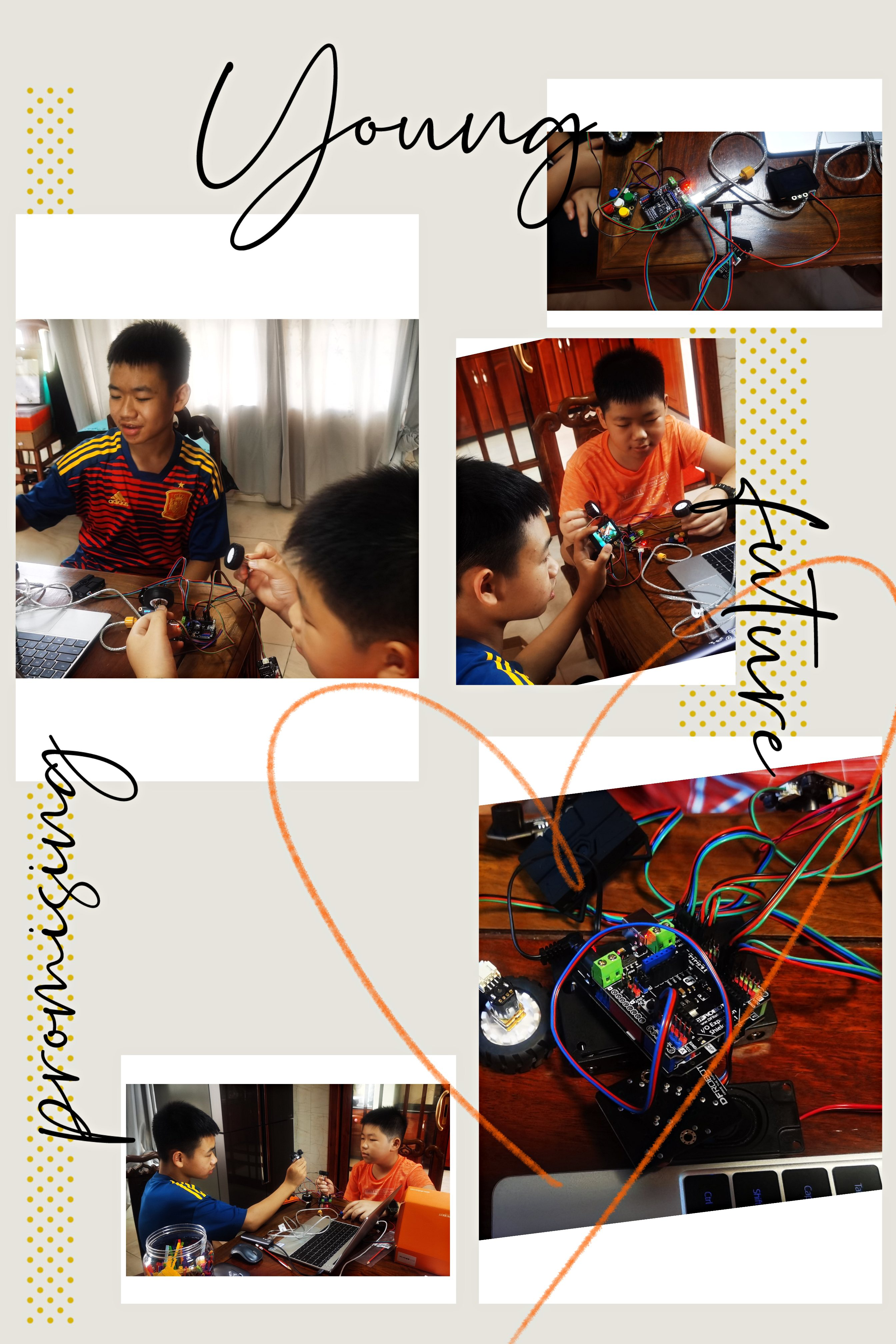
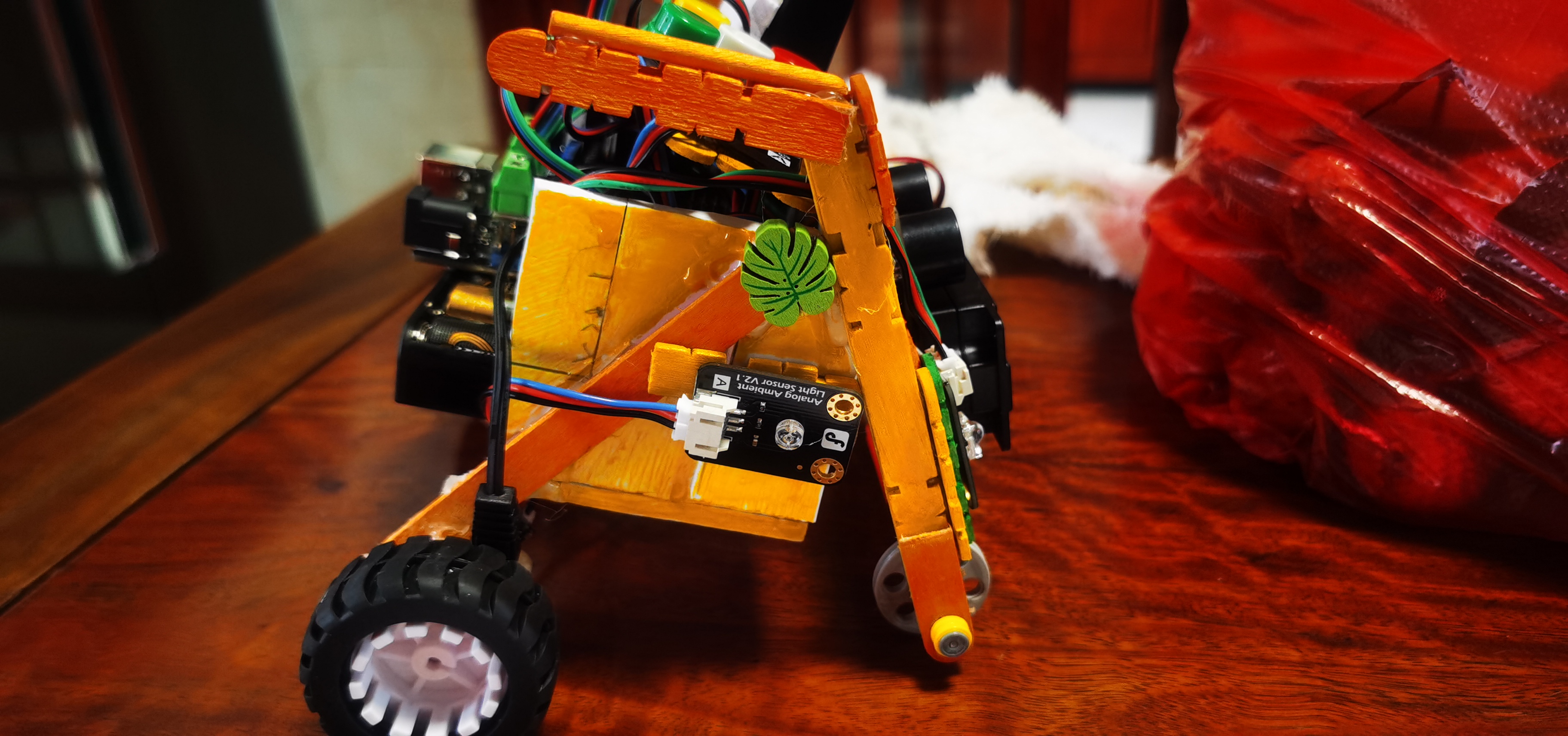
步骤5 调试
在片刻伤感后,立刻打起精神继续奋斗。我们俩有了第一次制作经验后,制作的过程快了很多。李老师同时也提出:想要稳固结构,想想三角形。我们俩顿时醍醐灌顶!对哦!马上往这一方面查找资料,原来三角形有着稳固,坚定耐压的特点,制作出来的助行器更加牢固耐用的特点。

硬件清单
1x
arduino(教育版)
1x
IO传感器扩展板
1x
二哈视图(教育版)
1x
超声波
1x
模拟按键模块
1x
音频录放模块
1x
小喇叭
2x
金属减速舵机
2x
轮子
2x
红色LED灯
1x
6节5号电池盒带插头
x
x

附件
队伍名称 梧州市工厂路小学s队 参赛组别 小学
参赛学生 吴梓豪 450404200904020619 周子迪 梧州市工厂路小学
指导老师
李欣然 梧州市工厂路小学指导老师
卢炎梅 梧州市工厂路小学