上海智位机器人股份有限公司 沪ICP备09038501号-4

智能婴儿车

发布时间:2021-05-27
创意灵感:随着经济的发展和技术的进步,人们对婴儿用品的需求也越来越.多样化,婴儿车作为一种传统的婴儿用品,是一种为婴儿户外活动提供便利而设计的工具车,在现代社会中也有着广泛的市场需求。尽管现在的婴儿车的品牌和种类十分的丰富,但市场上的婴儿车依旧是以传统的婴儿车为主,其有着功能单一-,使用不太方便的缺点。当然,现在市场上也出现了一些多功能婴儿车,不过大多数产品在功能方面还有着较大的局限性。
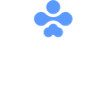
作品展示:
作品功能:1、当婴儿车启动时,舵机会自动放下,处于手动状态,但当在农村或者道路不平时,可以按下绿色按钮模块,这时,婴儿车的活动轮会收起,婴儿车由履带驱动,不易打滑,防止粗心的妈妈们把婴儿车停在下坡路。 使婴儿出现危险。 2、而当在老小区时,可以按下蓝色按钮模块,这时,电机会驱动,由于履带的特性,履带车可以辅助爬楼。 3、针对于在爬楼过程中婴儿车会存在倾斜的情况,我们特意设计了平衡结构,始终让婴儿处于水平的一个状态。 4、网络上许多真实的案例反应,婴儿在三个多月会翻身睡觉,而很多新手妈妈们由于自己的疏忽大意造成婴儿窒息死亡,针对于这项事件,我们用了人体红外传感器和二哈识图,当婴儿在婴儿车睡觉时,人体红外会检测,这时,二哈会对婴儿进行人脸识别,当婴儿的脸部不存在摄像头内,这时会进行红光报警,提醒妈妈婴儿翻身。需要调整睡姿。
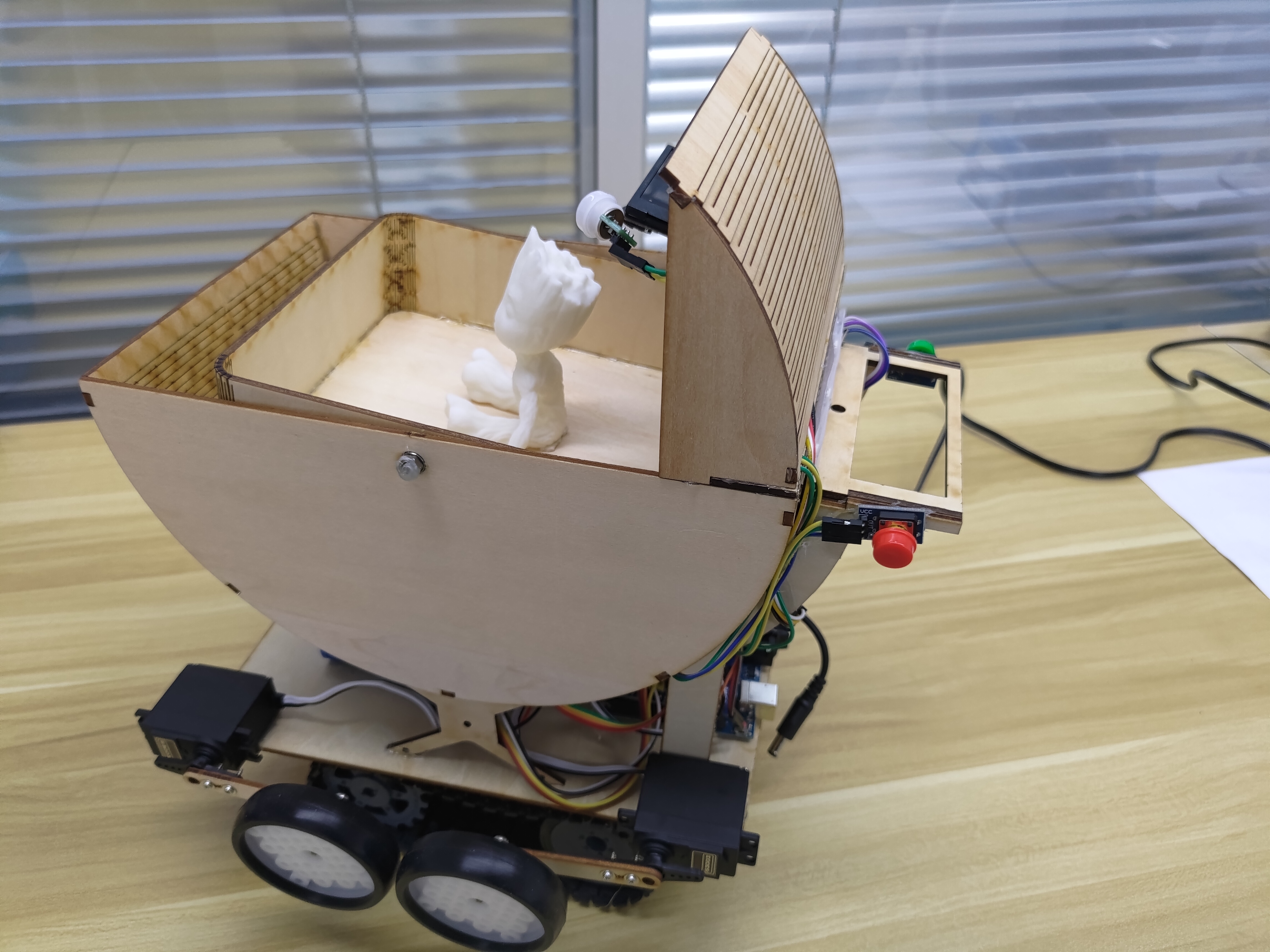
步骤1 :1用laserMaker设计设计智能婴儿车其他部件激光切割图纸
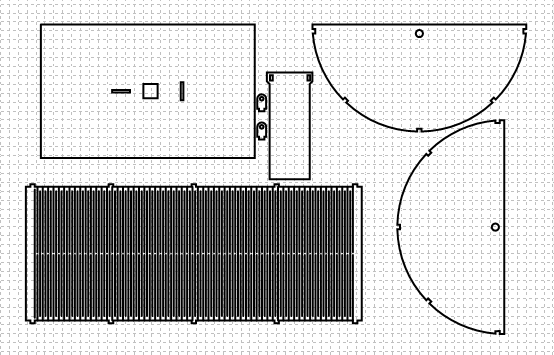
步骤2 用laserMaker设计设计智能婴儿车其他部件激光切割图纸
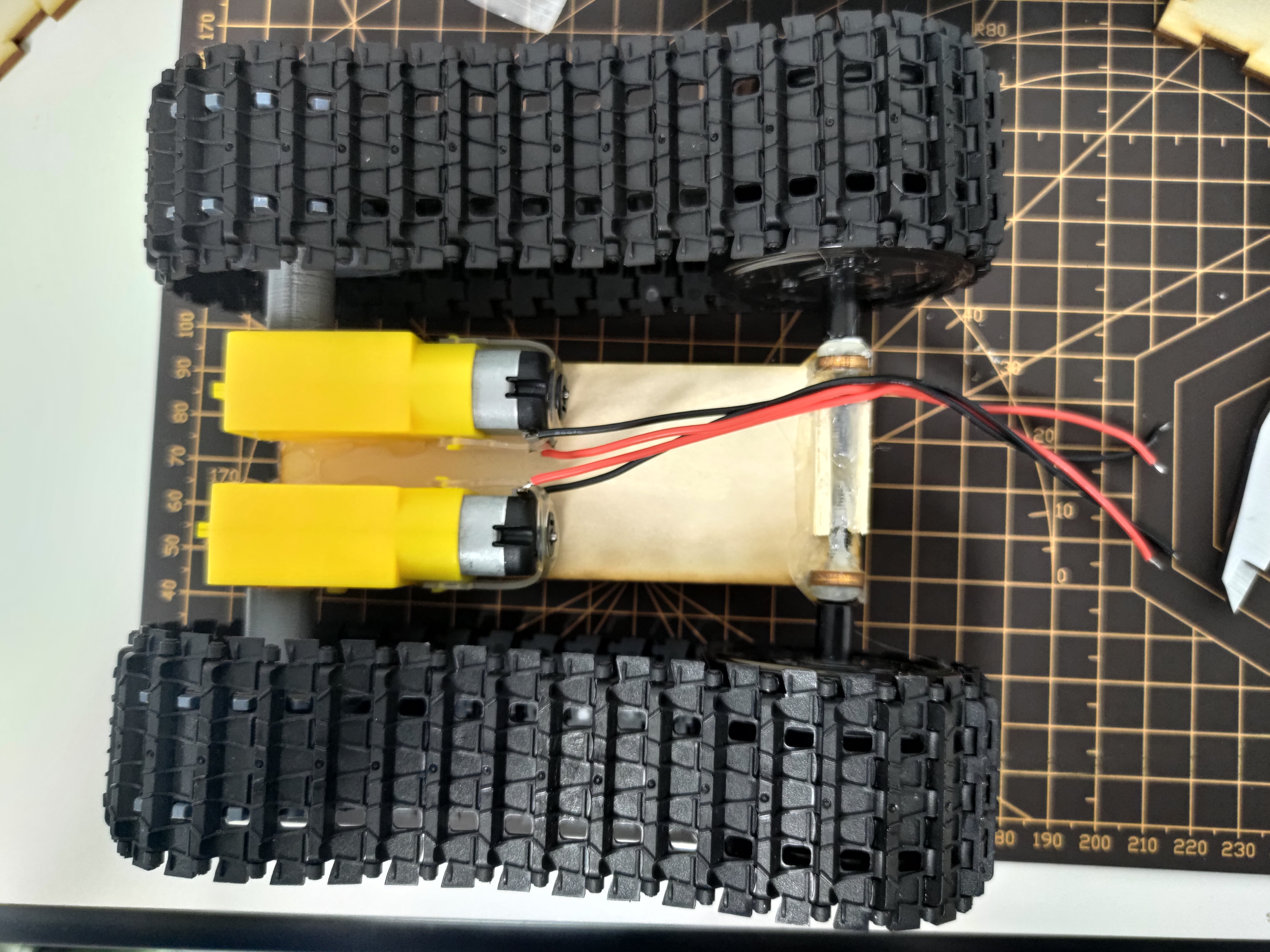
步骤3 用胶枪固定履带以及电机和固定底板

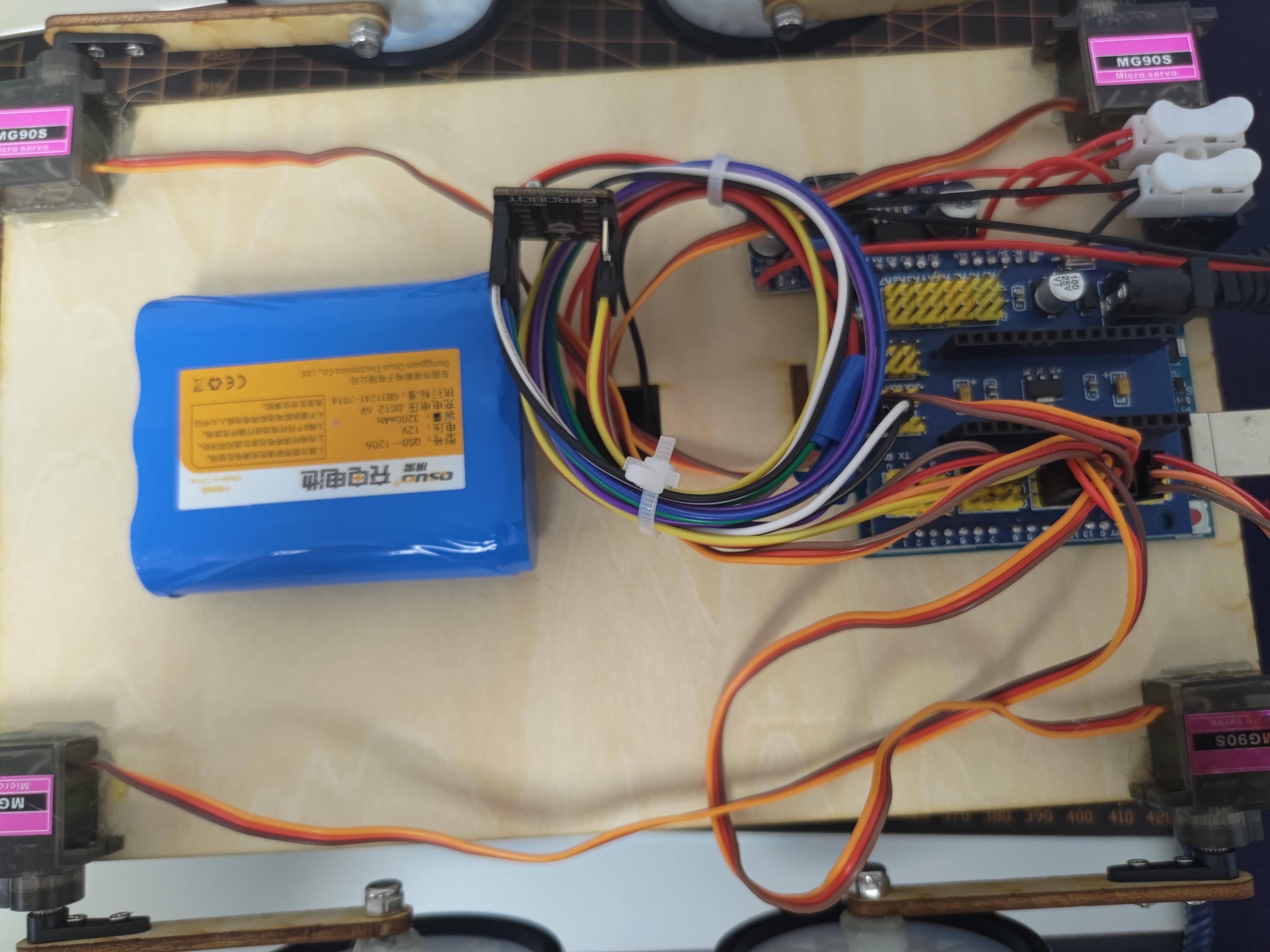
步骤4 固定电源,连接硬件控制板以及舵机
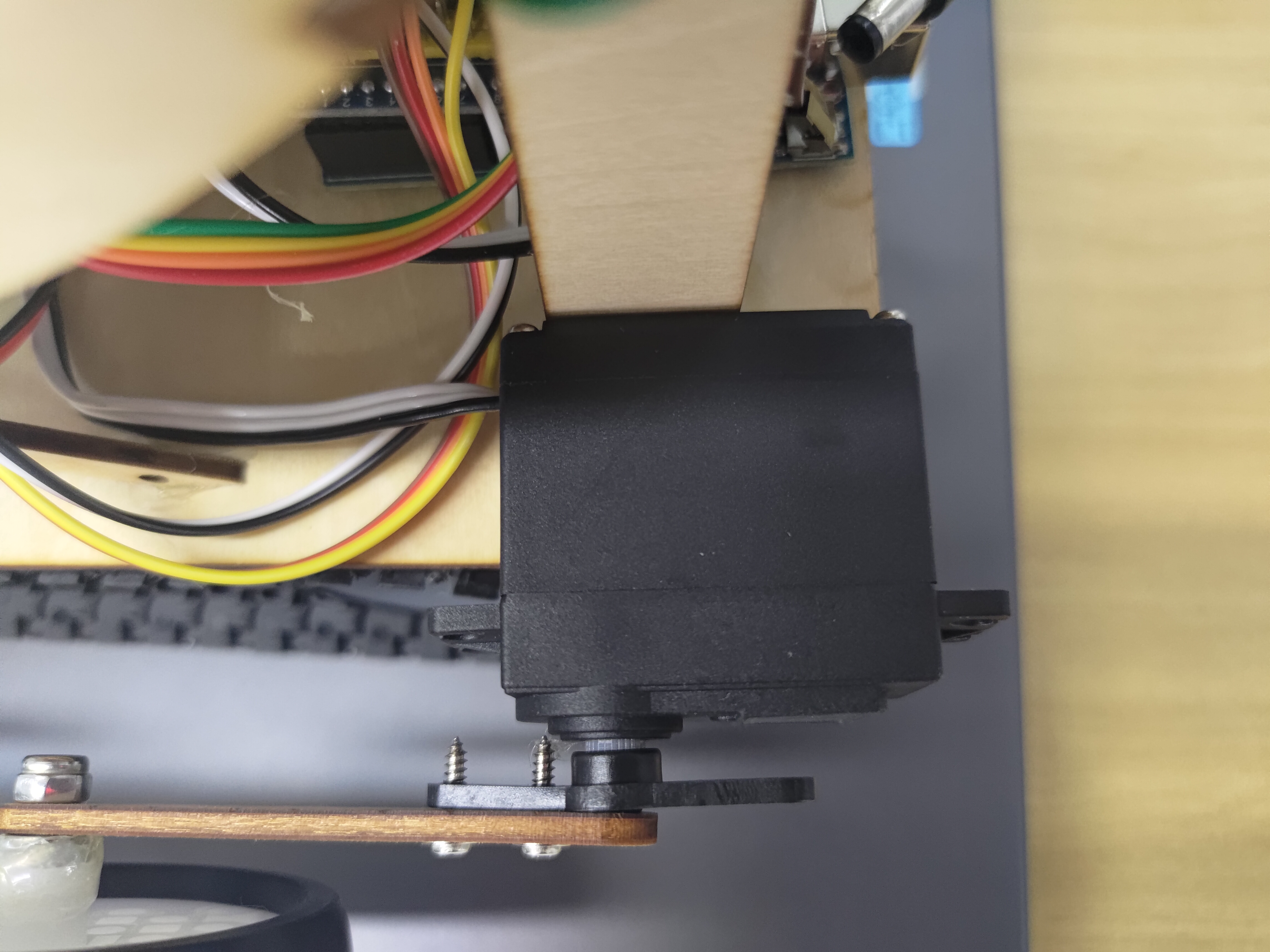
步骤5 安装舵机并调整舵机位置

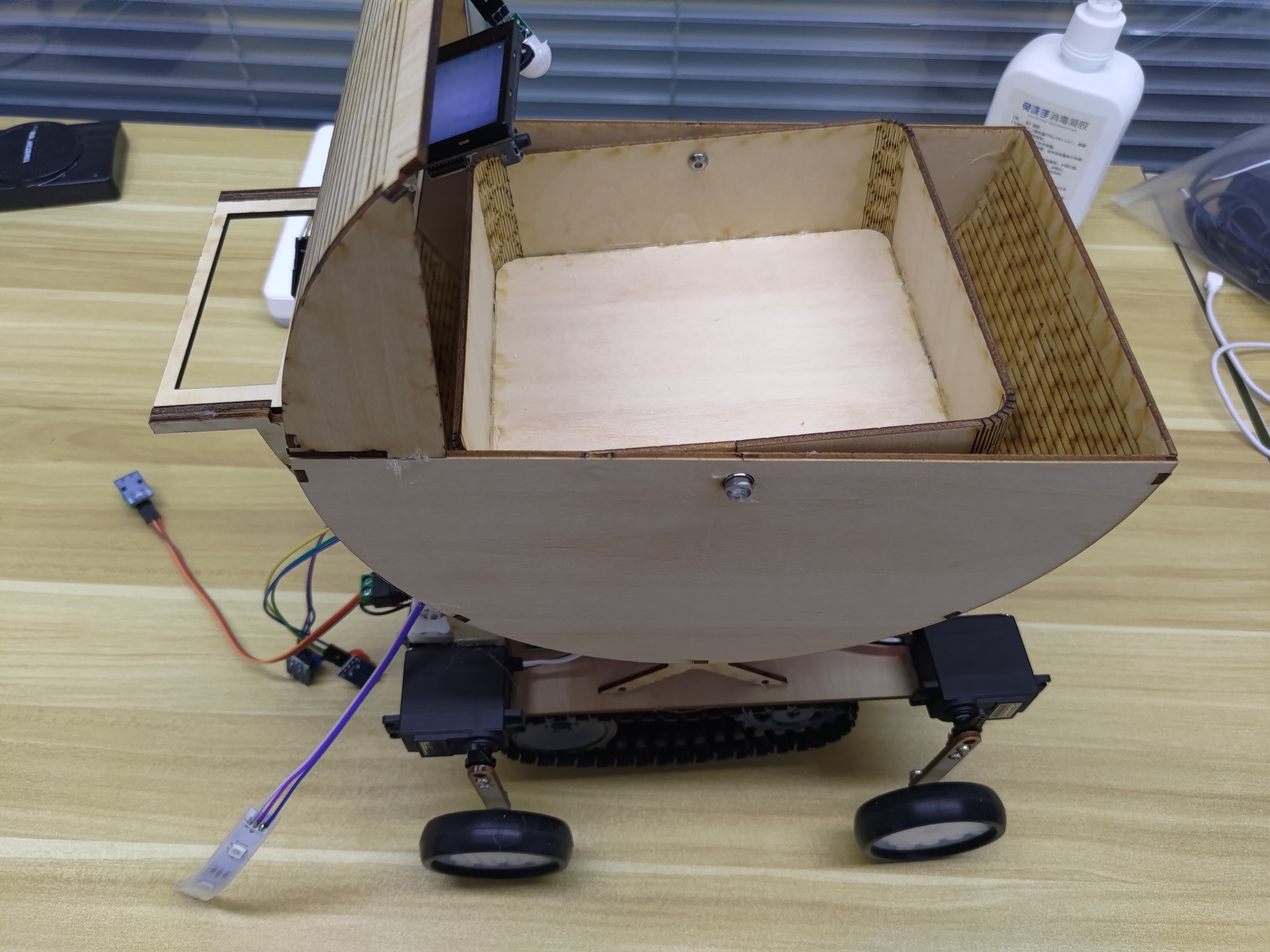
步骤6 安装整体结构
步骤7 硬件与代码调试

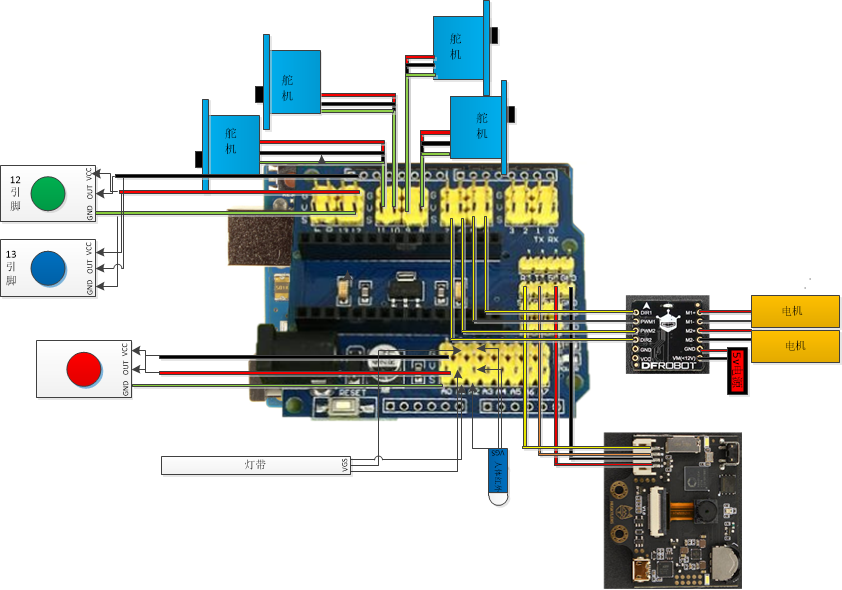
硬件接线图
代码
/*!
* MindPlus
* uno
*
*/
#include <DFRobot_Servo.h>
#include <DFRobot_NeoPixel.h>
#include <DFRobot_HuskyLens.h>
// 函数声明
void DF_ChuShi();
void DF_ZhanKai();
// 创建对象
Servo servo_10;
Servo servo_11;
Servo servo_8;
Servo servo_9;
DFRobot_NeoPixel neoPixel_A2;
DFRobot_HuskyLens huskylens;
// 主程序开始
void setup() {
servo_10.attach(10);
servo_11.attach(11);
servo_8.attach(8);
servo_9.attach(9);
neoPixel_A2.begin(A2, 3);
huskylens.beginI2CUntilSuccess();
huskylens.writeAlgorithm(ALGORITHM_FACE_RECOGNITION);
DF_ChuShi();
}
void loop() {
huskylens.request();
if (huskylens.isLearned(1)) {
if (huskylens.isAppear(1,HUSKYLENSResultBlock)) {
neoPixel_A2.setRangeColor(0, 3, 0x00FF00);
delay(5000);
neoPixel_A2.setRangeColor(0, 3, 0x000000);
}
else {
if ((analogRead(A1)==1)) {
neoPixel_A2.setRangeColor(0, 3, 0xFF0000);
delay(5000);
neoPixel_A2.setRangeColor(0, 3, 0x000000);
}
}
}
if ((digitalRead(13)==1)) {
DF_ZhanKai();
}
if ((digitalRead(12)==1)) {
DF_ChuShi();
}
if ((digitalRead(A0)==1)) {
digitalWrite(4, HIGH);
digitalWrite(7, HIGH);
analogWrite(5, 255);
analogWrite(6, 255);
}
}
// 自定义函数
void DF_ChuShi() {
servo_10.angle(abs(125));
servo_11.angle(abs(125));
servo_8.angle(abs(128));
servo_9.angle(abs(178));
}
void DF_ZhanKai() {
servo_10.angle(abs(60));
servo_11.angle(abs(180));
servo_8.angle(abs(180));
servo_9.angle(abs(125));
}
附件
队伍名称 云鹰飞将 参赛组别 初中
参赛学生 夏禹涵 南京外国语学校仙林分校燕子矶校区 杨振豪 南京外国语学校仙林分校燕子矶校区
指导老师
张登乾 江苏意若思科技有限公司指导老师
孙继龙 江苏意若思科技有限公司