上海智位机器人股份有限公司 沪ICP备09038501号-4

助老机器人

发布时间:2021-05-08
我们通过讨论,发现在生活中,有些人喜欢买菜,但是一次买的菜又非常的多,而且菜又非常的重。有没有人来帮他们提菜。一些行动不便的老人和残疾人又无法提着这一大包一大包的菜回家,所以我们想出,做出一个机器人,让它可以帮助这些老人和残疾人来提菜。
步骤1 设计底板和基础功能
我们采用环氧树脂板来当小车底板,这可以让小车更加坚固。在板上我们预留了我们需要装的东西的孔位,这让我们的工作速度更快。另外为了更好地实现在买菜时小车的跟随效果,我们打算采用红外数据发送和定位接受的方式,使小车能够紧跟人的脚步运动。

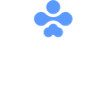
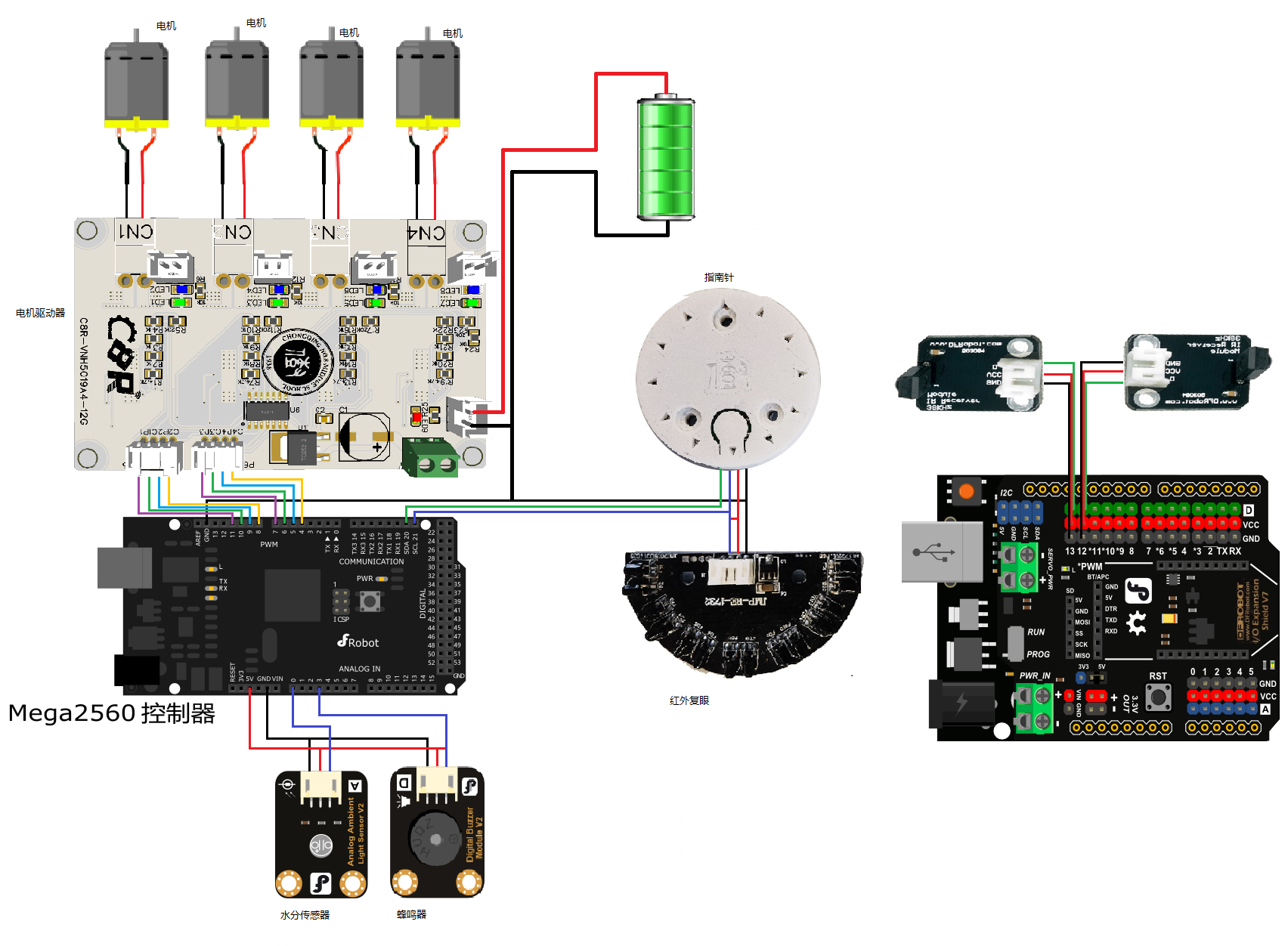
步骤2 电路设计
我们在纸上先设计电路,让我们对机器大概有了一个了解,也使我们可以更好的进行设计。其中小车需要进行全向运动和红外信号跟踪,而可穿戴模块则需要进行红外信号的发送。除此之外我们还加入了一个水分传感器的设计,可以检测是否下雨,进行相应的提示。

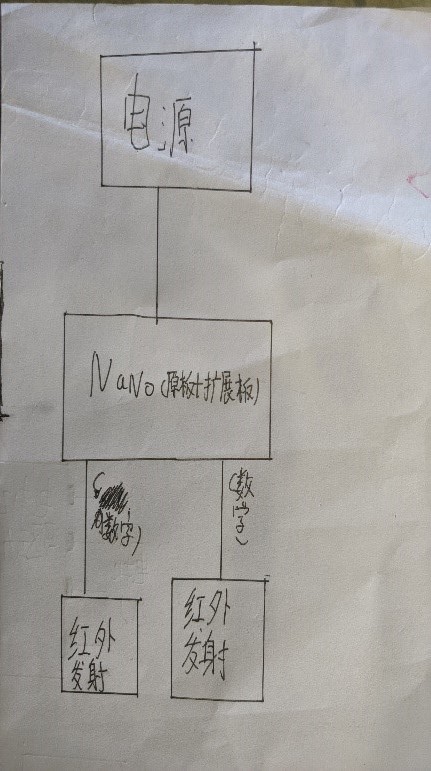
步骤3 3D打印结构设计
我们通过3D one设计出控制器的盒子,这个盒子可以刚好装下材料,并且可以拧上螺丝,用魔术贴套在腰上
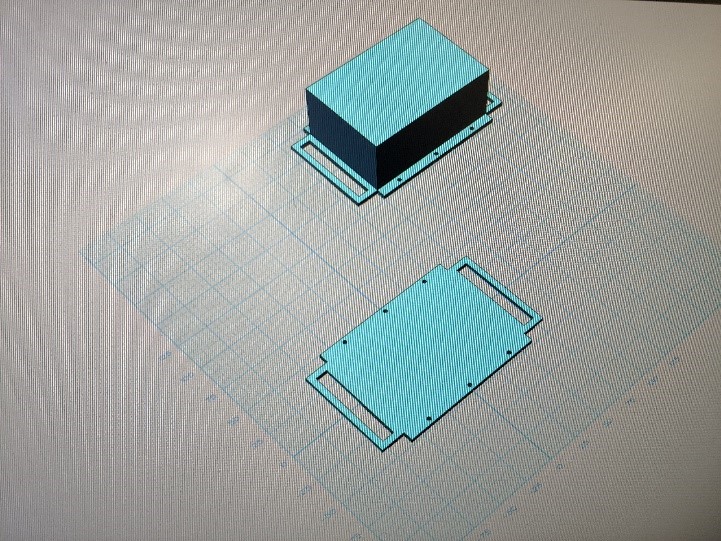

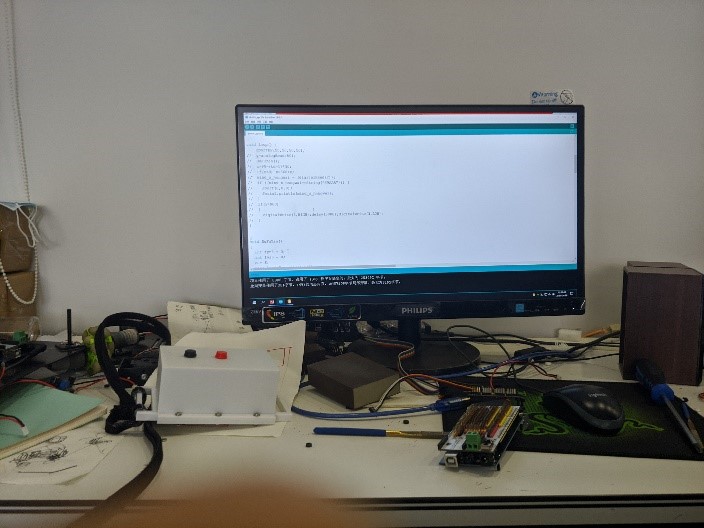
步骤4 程序编写及调试
我们使用Arduino进行编程,我们在小车上安装了复眼和指南针,所以使用了之前写过的指南针和复眼读取程序,后来为了方便一些库的调用,将程序移植到MIND+中,程序不是很难,但由于电路结构比较麻烦,花费了一些时间进行每个硬件的调试。
步骤5 组装及功能测试
我们将测试好程序的分立模块逐个组装起来,我们的提菜机器人的结构就做好了,再把程序也逐个拼合,全向运动小车依靠指南针保持头部朝向,避免跟随时快速甩动,由于我们的红外接收装置使用了复眼,而这个复眼是需要接收调制信号的,于是我们将之前的红外信号发射模块进行了更换。我们利用红外测距传感器对足球机器人的干扰原理,加入了两个红外闪光模块,进行电源控制,作为信号发射源。


附件
队伍名称 买菜队 参赛组别 初中
参赛学生 王嘉誉 重庆市第八中学校 王子路 重庆市第八中学校
指导老师
孙宇新 重庆市第八中学校