上海智位机器人股份有限公司 沪ICP备09038501号-4

作品名称:守户者

发布时间:2021-04-16
作品设计:何昊泽 李文涛
模型设计:何昊泽 李文涛
程序设计:李文涛
材料收集:何昊泽
指导教师:魏鹏飞 陈晓雪
一、创作灵感:听力障碍者在户外运动或探险,攀登高山,出外踏青......在这些应用场景下,有时需要一些可以简单判定所处环境范围的设备,有时需要与他人通信,而又有时需要放出紧急求救信号,为什么不把这些功能做在一起呢?经过多次尝试,我们成功将自己的想法与Arduino结合,设计出了多功能户外装置。
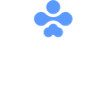
二、功能介绍
三、演示视频
四、制作过程
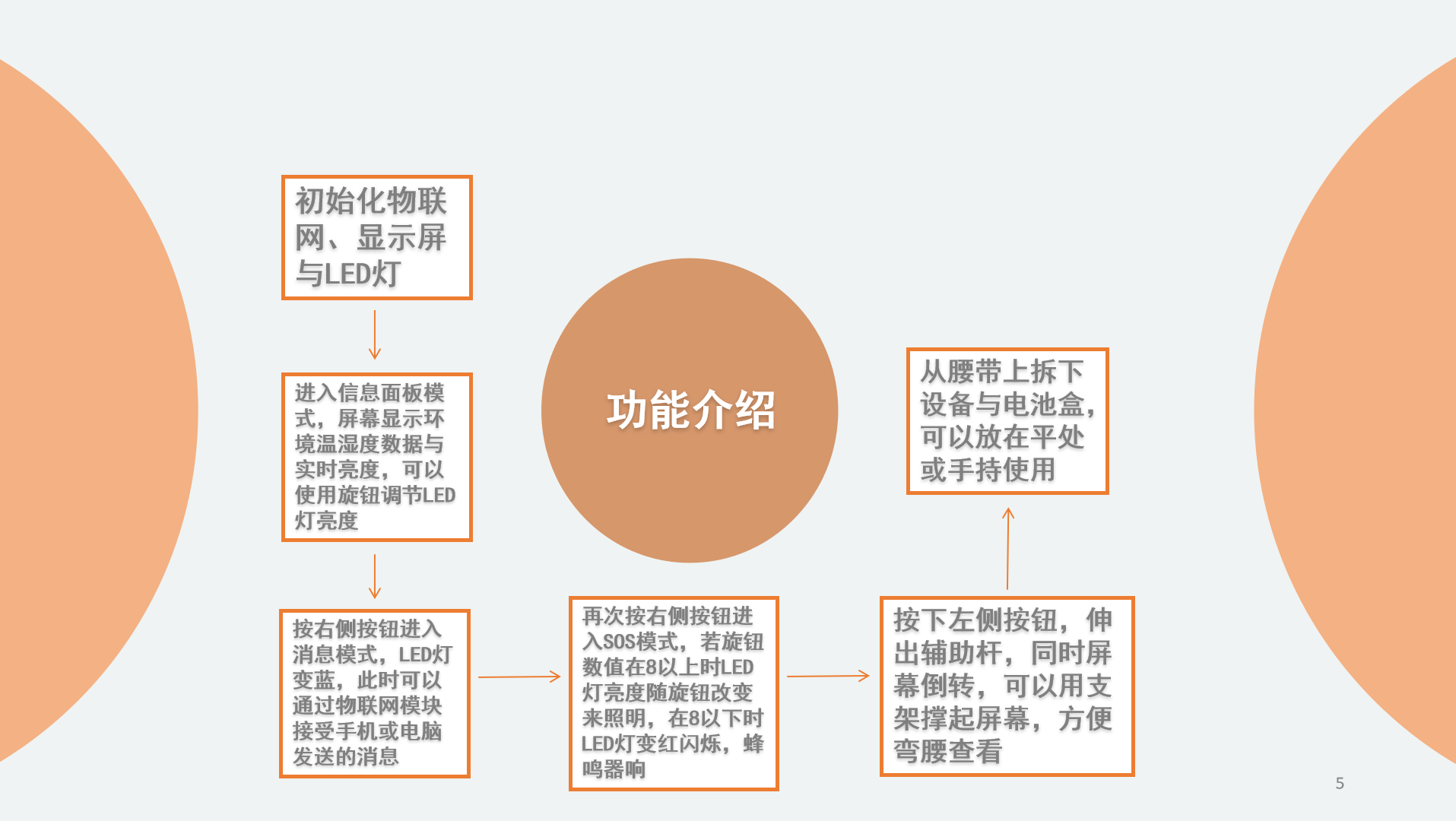
步骤1 裁切与拼装
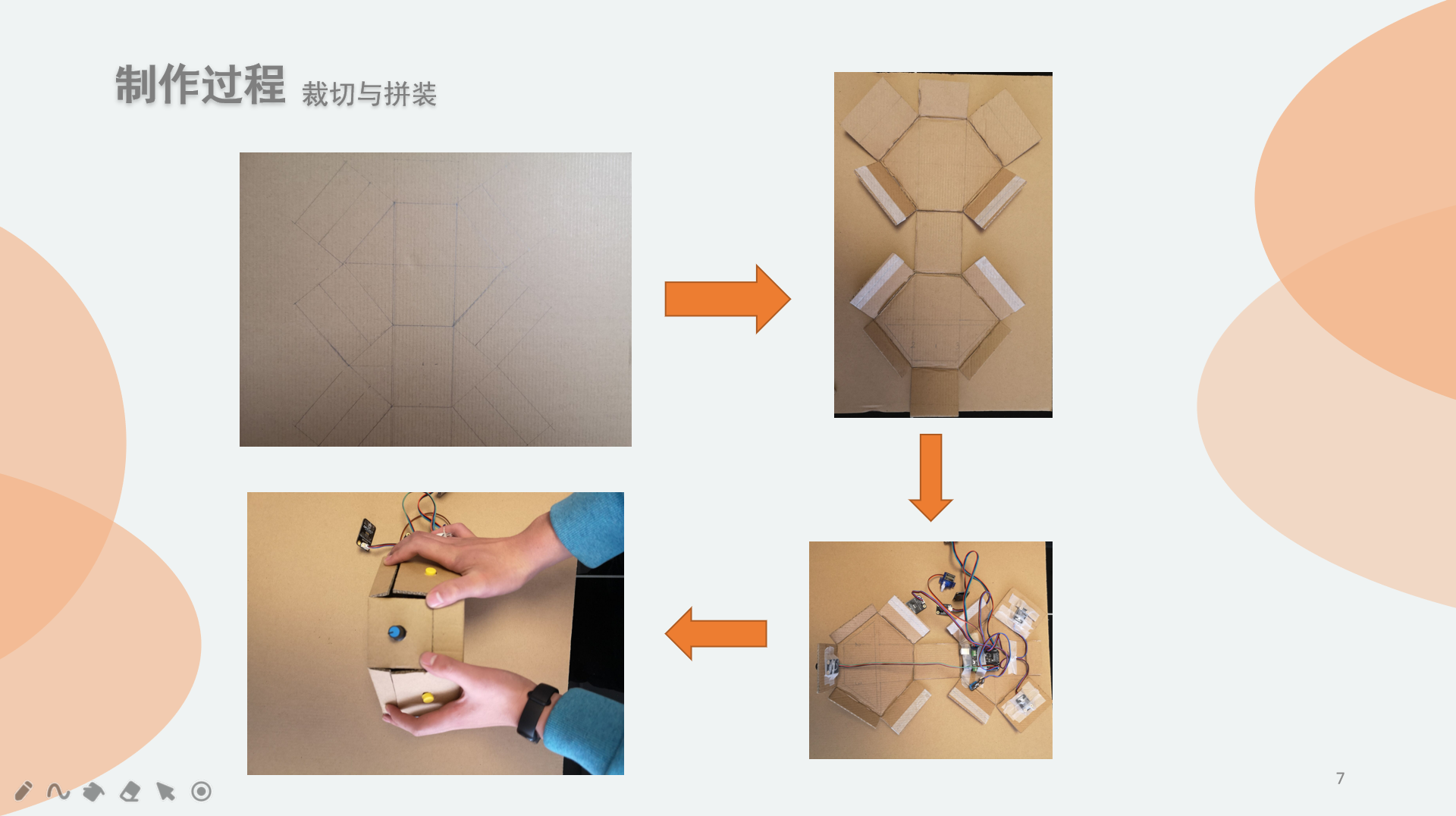
2、固定与装饰
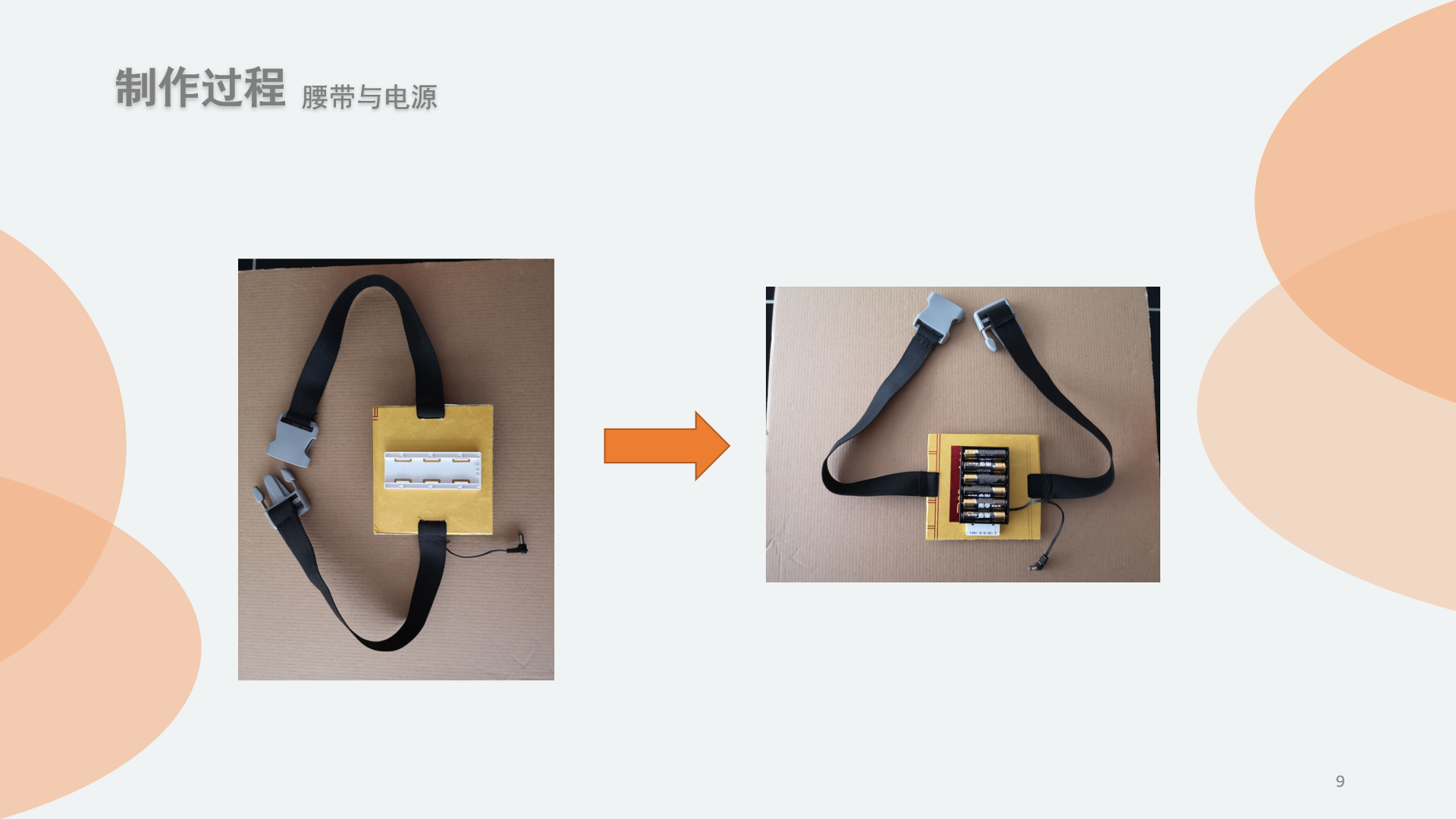
3、腰带与电源
五、硬件清单
硬件清单
1x
Arduino主控板
1x
按钮
1x
旋钮
1x
舵机
1x
温湿度传感器
1x
蜂鸣器
1x
OLED显示屏
1x
LED灯
1x
物联网模块
1x
指南针
1x
纸板
六、程序代码
代码
#include <DFString.h>
#include <UNO_Obloq.h>
#include <DFRobot_DHT.h>
#include <DFRobot_Servo.h>
#include <SoftwareSerial.h>
#include <DFRobot_NeoPixel.h>
#include <DFRobot_SSD1306_I2C.h>
// 动态变量
String mind_s_T;
volatile float mind_n_a, mind_n_i;
// 函数声明
void DF_XiaoXi();
void DF_AnNiu();
void DF_XinXiMianBan();
void DF_DuoJi();
void DF_SOS();
void DF_ChuShiHua();
// 静态常量
const chCode chBuf[] = {
{0x6d88,0xe6b688,0xCFFB,{0x00,0x40,0x22,0x48,0x11,0x48,0x11,0x50,0x80,0x40,0x43,0xf8,0x4a,0x08,0x0a,0x08,0x13,0xf8,0x12,0x08,0xe2,0x08,0x23,0xf8,0x22,0x08,0x22,0x08,0x22,0x28,0x02,0x10}},
{0x606f,0xe681af,0xCFA2,{0x01,0x00,0x02,0x00,0x1f,0xf0,0x10,0x10,0x1f,0xf0,0x10,0x10,0x1f,0xf0,0x10,0x10,0x1f,0xf0,0x10,0x10,0x01,0x00,0x08,0x84,0x48,0x92,0x48,0x12,0x87,0xf0,0x00,0x00}},
{0x4fe1,0xe4bfa1,0xD0C5,{0x08,0x40,0x08,0x20,0x0b,0xfe,0x10,0x00,0x10,0x00,0x31,0xfc,0x30,0x00,0x50,0x00,0x91,0xfc,0x10,0x00,0x10,0x00,0x11,0xfc,0x11,0x04,0x11,0x04,0x11,0xfc,0x11,0x04}},
{0x9762,0xe99da2,0xC3E6,{0x00,0x00,0xff,0xfe,0x02,0x00,0x02,0x00,0x04,0x00,0x3f,0xf8,0x24,0x48,0x24,0x48,0x27,0xc8,0x24,0x48,0x24,0x48,0x27,0xc8,0x24,0x48,0x24,0x48,0x3f,0xf8,0x20,0x08}},
{0x677f,0xe69dbf,0xB0E5,{0x10,0x08,0x10,0x1c,0x11,0xe0,0x11,0x00,0xfd,0x00,0x11,0xfc,0x31,0x44,0x39,0x44,0x55,0x44,0x55,0x28,0x91,0x28,0x11,0x10,0x11,0x10,0x12,0x28,0x12,0x44,0x14,0x82}},
{0x5b9e,0xe5ae9e,0xCAB5,{0x02,0x00,0x01,0x00,0x7f,0xfe,0x40,0x02,0x88,0x84,0x04,0x80,0x04,0x80,0x10,0x80,0x08,0x80,0x08,0x80,0xff,0xfe,0x01,0x40,0x02,0x20,0x04,0x10,0x18,0x08,0x60,0x04}},
{0x65f6,0xe697b6,0xCAB1,{0x00,0x08,0x00,0x08,0x7c,0x08,0x44,0x08,0x45,0xfe,0x44,0x08,0x44,0x08,0x7c,0x08,0x44,0x88,0x44,0x48,0x44,0x48,0x44,0x08,0x7c,0x08,0x44,0x08,0x00,0x28,0x00,0x10}},
{0x4eae,0xe4baae,0xC1C1,{0x02,0x00,0x01,0x00,0x7f,0xfc,0x00,0x00,0x1f,0xf0,0x10,0x10,0x1f,0xf0,0x00,0x00,0x7f,0xfe,0x40,0x02,0x8f,0xe4,0x08,0x20,0x08,0x20,0x10,0x22,0x20,0x22,0xc0,0x1e}},
{0x5ea6,0xe5baa6,0xB6C8,{0x01,0x00,0x00,0x80,0x3f,0xfe,0x22,0x20,0x22,0x20,0x3f,0xfc,0x22,0x20,0x22,0x20,0x23,0xe0,0x20,0x00,0x2f,0xf0,0x24,0x10,0x42,0x20,0x41,0xc0,0x86,0x30,0x38,0x0e}},
{0x6e29,0xe6b8a9,0xCEC2,{0x00,0x00,0x23,0xf8,0x12,0x08,0x12,0x08,0x83,0xf8,0x42,0x08,0x42,0x08,0x13,0xf8,0x10,0x00,0x27,0xfc,0xe4,0xa4,0x24,0xa4,0x24,0xa4,0x24,0xa4,0x2f,0xfe,0x00,0x00}},
{0x2103,0xe28483,0xA1E6,{0x60,0x00,0x91,0xf4,0x96,0x0c,0x6c,0x04,0x08,0x04,0x18,0x00,0x18,0x00,0x18,0x00,0x18,0x00,0x18,0x00,0x18,0x00,0x08,0x00,0x0c,0x04,0x06,0x08,0x01,0xf0,0x00,0x00}},
{0x6e7f,0xe6b9bf,0xCAAA,{0x00,0x00,0x27,0xf8,0x14,0x08,0x14,0x08,0x87,0xf8,0x44,0x08,0x44,0x08,0x17,0xf8,0x11,0x20,0x21,0x20,0xe9,0x24,0x25,0x28,0x23,0x30,0x21,0x20,0x2f,0xfe,0x00,0x00}}
};
const String topics[5] = {"xm/1","","","",""};
// 创建对象
DFRobot_SSD1306_I2C oled12864;
DFRobot_NeoPixel neoPixel_4;
DFRobot_DHT dht11_A3;
Servo servo_9;
UNO_Obloq olq;
SoftwareSerial softSerial(2, 3);
// 主程序开始
void setup() {
oled12864.setChCode(chBuf);
dht11_A3.begin(A3, DHT11);
servo_9.attach(9);
DF_ChuShiHua();
}
void loop() {
if ((digitalRead(5)==1)) {
DF_AnNiu();
}
if (((((int)mind_n_a) % ((int)3))==0)) {
DF_XinXiMianBan();
}
else if (((((int)mind_n_a) % ((int)3))==1)) {
DF_XiaoXi();
}
else if ((((((int)mind_n_a) % ((int)3))==2) && (analogRead(A2)<8))) {
DF_SOS();
}
else {
neoPixel_4.setRangeColor(0, 4, 0xFFFF99);
neoPixel_4.setBrightness((map(analogRead(A2), 0, 1023, 0, 255)));
}
if (((((int)mind_n_a) % ((int)3))==2)) {
oled12864.setCursorLine(1);
oled12864.printLine("SOS");
}
DF_DuoJi();
}
// 自定义函数
void DF_XiaoXi() {
oled12864.setCursorLine(1);
oled12864.printLine("消息");
neoPixel_4.setRangeColor(0, 4, 0x6600CC);
neoPixel_4.setBrightness(6);
mind_s_T = olq.getMessage(olq.topic_0);
for (int index = 0; index < 1; index++) {
digitalWrite(10, HIGH);
delay(40);
digitalWrite(10, LOW);
for (int index = 0; index < 100; index++) {
oled12864.setCursorLine(2);
oled12864.printLine(mind_s_T);
delay(10);
}
}
}
void DF_AnNiu() {
delay(500);
mind_n_a += 1;
oled12864.fillScreen(0);
digitalWrite(10, HIGH);
delay(40);
digitalWrite(10, LOW);
}
void DF_XinXiMianBan() {
neoPixel_4.setRangeColor(0, 4, 0xFFFF99);
neoPixel_4.setBrightness((map(analogRead(A2), 0, 1023, 0, 255)));
oled12864.setCursorLine(1);
oled12864.printLine("信息面板");
oled12864.setCursorLine(2);
oled12864.printLine((String("实时亮度") + String(analogRead(A2))));
oled12864.setCursorLine(3);
oled12864.printLine((String((String("温度 ") + String((dfstring.substring((String(dht11_A3.getTemperature())),0,1,0,2))))) + String("℃")));
oled12864.setCursorLine(4);
oled12864.printLine((String((String("湿度 ") + String((dfstring.substring((String(dht11_A3.getHumidity())),0,1,0,2))))) + String("%rh")));
}
void DF_DuoJi() {
if ((digitalRead(8)==1)) {
mind_n_i += 1;
delay(1500);
if (((((int)mind_n_i) % ((int)2))==1)) {
servo_9.angle(abs(175));
oled12864.setRotaion(eROTATION_0);
}
else {
servo_9.angle(abs(85));
oled12864.setRotaion(eROTATION_180);
}
}
}
void DF_SOS() {
neoPixel_4.setRangeColor(0, 4, 0xFF0000);
while (!(!(((((int)mind_n_a) % ((int)3))==2) && (analogRead(A2)<8)))) {
for (int index = 0; index < 3; index++) {
neoPixel_4.setBrightness(255);
digitalWrite(10, HIGH);
delay(80);
neoPixel_4.setBrightness(0);
digitalWrite(10, LOW);
delay(80);
}
for (int index = 0; index < 3; index++) {
neoPixel_4.setBrightness(255);
digitalWrite(10, HIGH);
delay(700);
neoPixel_4.setBrightness(0);
digitalWrite(10, LOW);
delay(700);
}
for (int index = 0; index < 3; index++) {
neoPixel_4.setBrightness(255);
digitalWrite(10, HIGH);
delay(80);
neoPixel_4.setBrightness(0);
digitalWrite(10, LOW);
delay(80);
}
delay(2000);
}
}
void DF_ChuShiHua() {
softSerial.begin(9600);
olq.startConnect(&softSerial, "zhangT", "12345678", "siot", "dfrobot", topics, "192.168.0.106", 1883);
servo_9.angle(abs(86));
oled12864.begin(0x3c);
oled12864.fillScreen(0);
neoPixel_4.begin(4, 5);
neoPixel_4.setBrightness(0);
mind_n_a = 0;
mind_n_i = 0;
}
附件
队伍名称 秦安一中 参赛组别 高中,中专,职高
参赛学生 李文涛 秦安县第一中学 何昊泽 秦安县第一中学
指导老师
魏鹏飞 秦安县第一中学指导老师
陈晓雪 秦安县第一中学