上海智位机器人股份有限公司 沪ICP备09038501号-4

【示例作品】徜徉在绿水之上,Micro:bit can do it! ——三汊河水质采样监测、垃圾清理船

发布时间:2021-03-29
步骤1 作品主旨
【主旨】
可持续发展(全球目标14.4)
【其他主题】
保护长江、秦淮淮河水资源生态系统,实现人与自然和谐共生。
【概述】
三汊河位于南京市鼓楼区城西秦淮河入江口,因秦淮河、清江河、惠民河(后被填埋改造为惠民大道)、长江在此形成Y形江汊而得名。由于对河道周围的管制不到位,游客及垂钓者无视环保条例,产生少量的垃圾流入江内、河内,导致水质变坏,滋生蚊蝇等有害物质,水体污染严重。河道是一个城市的“血管”,在人和自然和谐相处的生态系统中起着重要的作用,为改变以上现状,实现“人水相依、和谐共处”的生态环境,水治理变得十分必要和迫切。 南京师范大学附属中学树人学校西临长江,北临秦淮河,地处三汊河,而树人学校水质社团目前正在实施一个对长江和秦淮河的水质进行监测,并对河道内的垃圾进行清理的项目。此项目是为了保护水下生物,实现人与自然的和谐发展,还原一个更美好、更健康的世界。

三汊河及树人学校地理位置
步骤2 功能简介
在以往树人水质社团活动中,我们曾经学习和了解了水资源生态环境的监测和治理,并也曾制作了水质监测船,但当时的作品只能对水质监测并不能完成垃圾清理,最主要的是由于船体太小,无法真正的应用到水体中去监测、采样和垃圾清理。于是我们对作品进行迭代。
(http://mc.dfrobot.com.cn/thread-269124-1-1.html)2018年早期作品,该作品设计制作方案发表在《无线电》杂志2018年11期。
【功能简介】
(1)水质采样监测:使用PH传感器、TDS传感器监测水质数据,利用蠕动泵采集水体样本带回实验室做进一步研究。
(2)垃圾识别清理:使用HuskyLens视觉识别传感器对水体内的垃圾进行识别清理。
(3)数据智能物联:将监测数据实时上传物联网平台,为进一步水质分析提供数据。
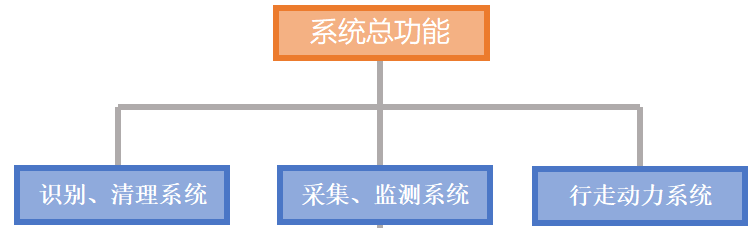
水质监测船系统功能图
步骤3 制作过程
【结构设计】
本作品结构设计包含两部分内容,第一:船体结构,第二:甲板结构。
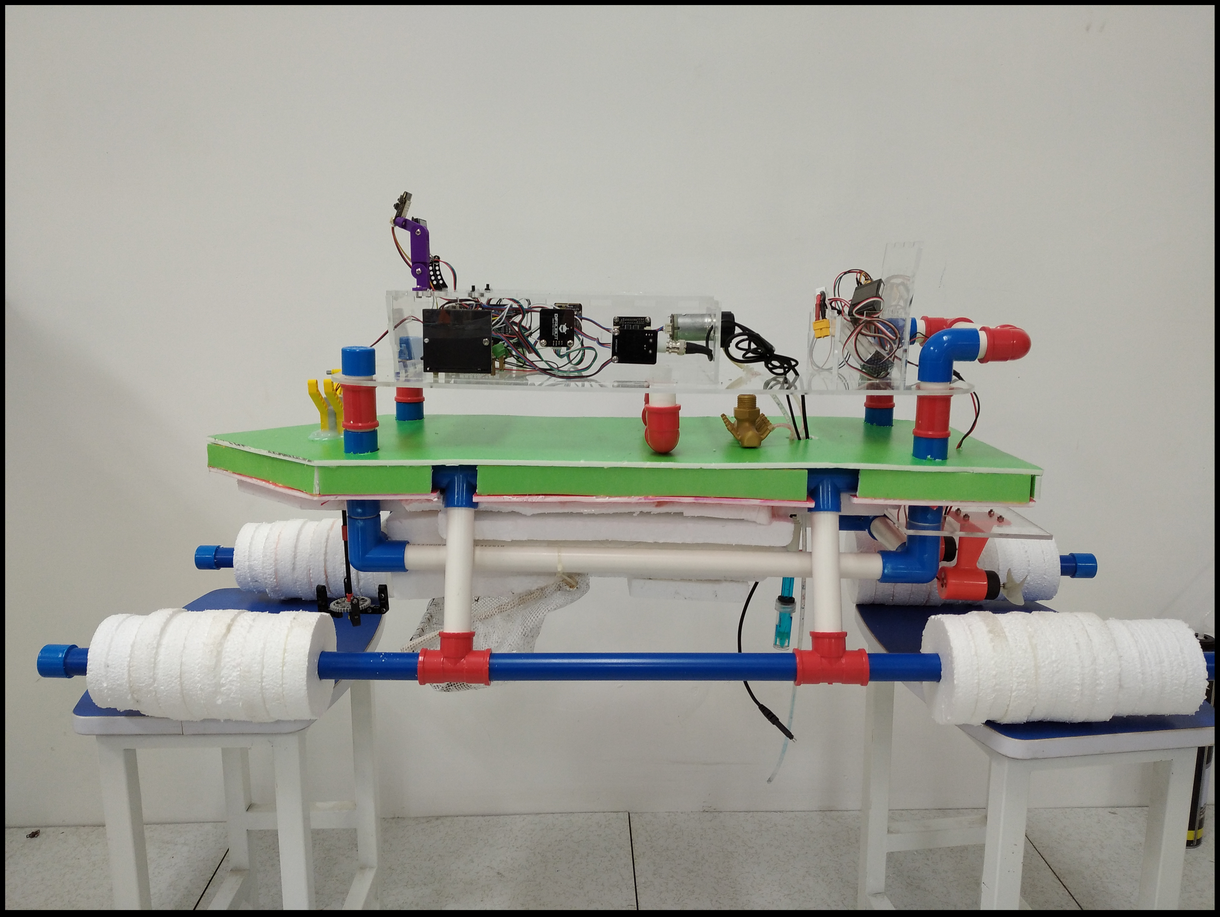
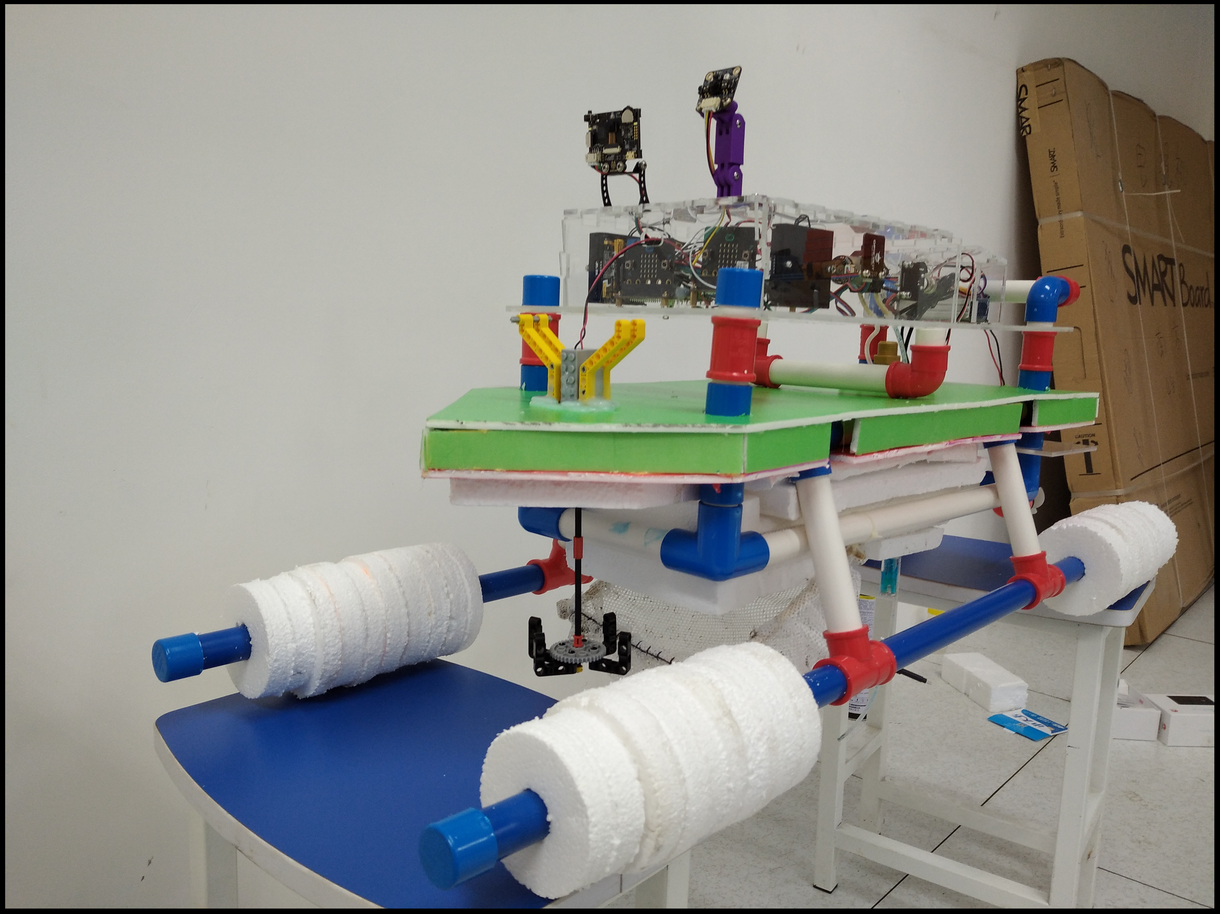
(1)船体结构
船体结构中我们使用了PVC材料和KT板制作,船体分为三部分构成:船本体、左船舷浮子,右船舷浮子。另外左右船舷浮子结构与船体通过三通连接,可以调整与船体之间的角度。入水时可以将其调整与船体在一条水平线上,增加船体的浮力;出水时调整夹角,可以起到支撑船体的作用。
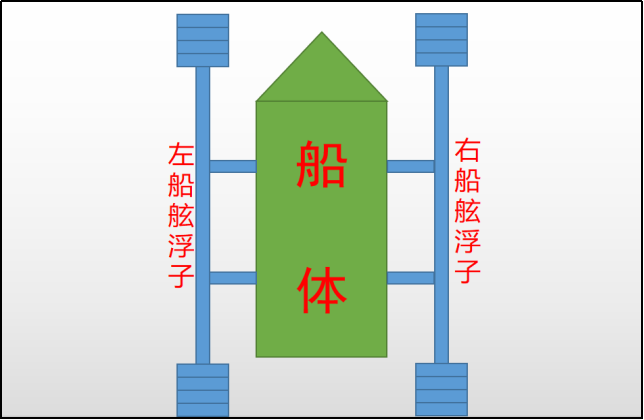
船体结构俯视图
出水时左右船舷作为支撑架
入水时左右船舷作为起到辅助漂浮的作用
(2)甲板结构
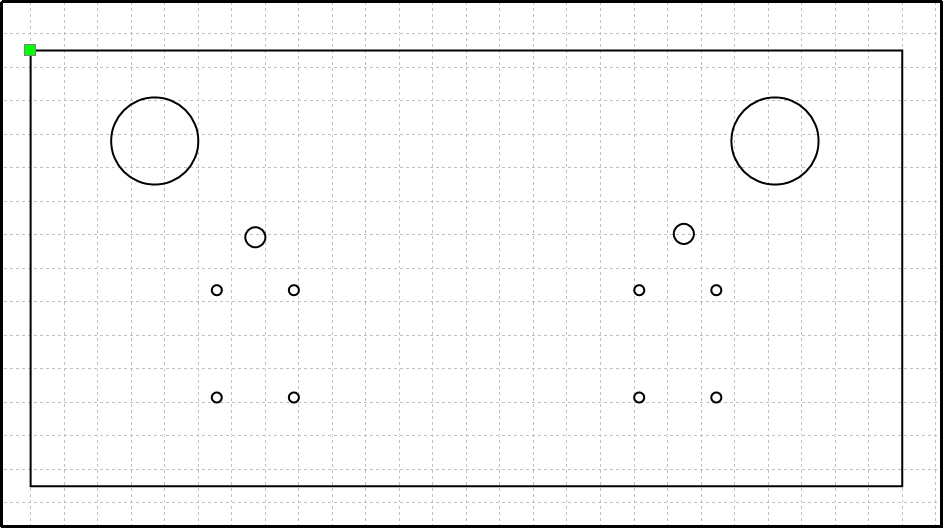
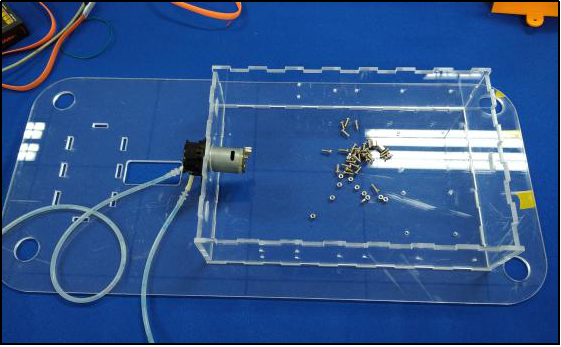
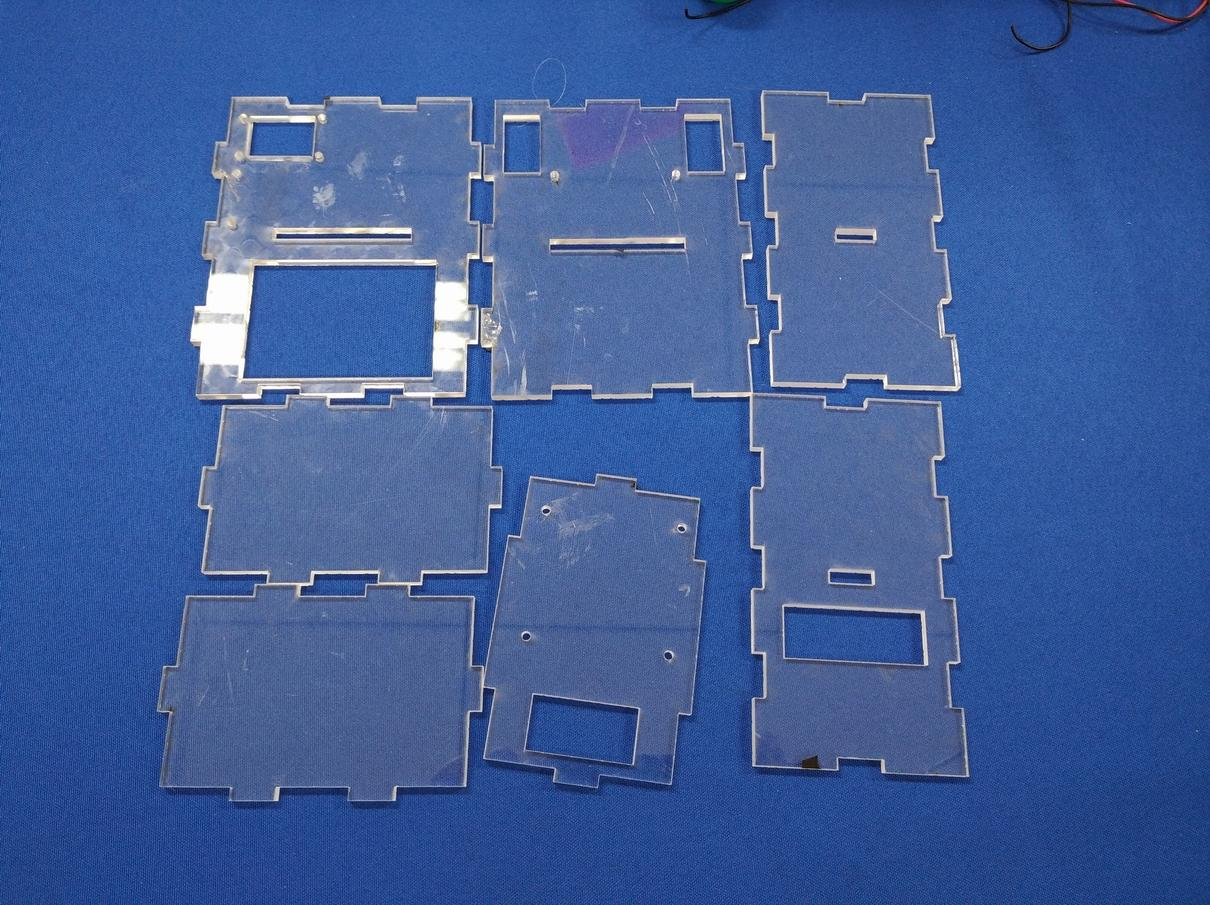
甲板结构主要用于承载相关电子件,我们使用LASERMAKE的快速造盒功能,将其分为监测舱和动力舱两部分。其中电子件分为三块:动力系统、识别清理系统、采样监测系统。具体到结构设计上,我们使用了亚格力板进行激光切割。设计草图如下所示:
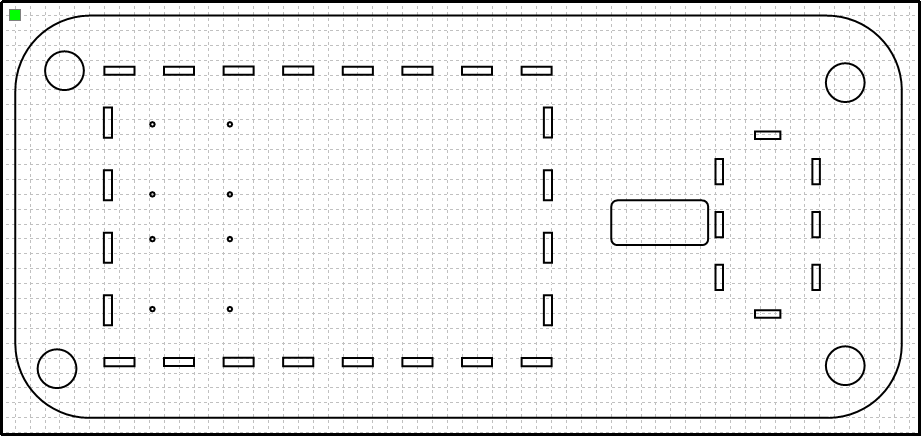
甲板底层
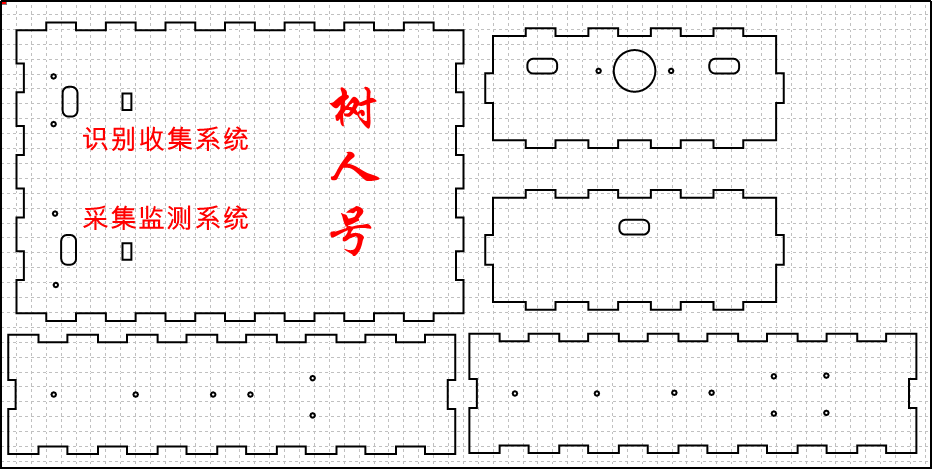
监测仓
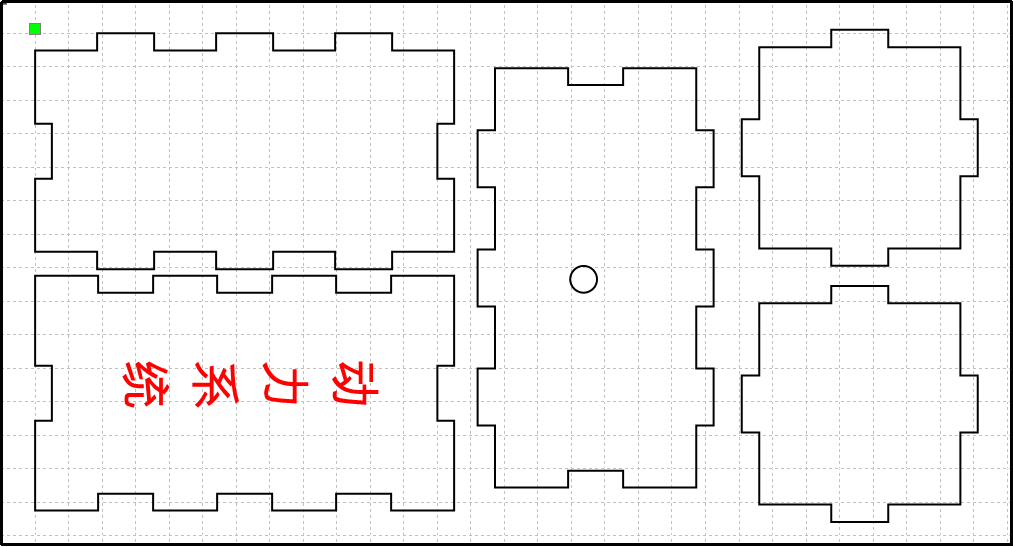
动力仓
水下电机固定板
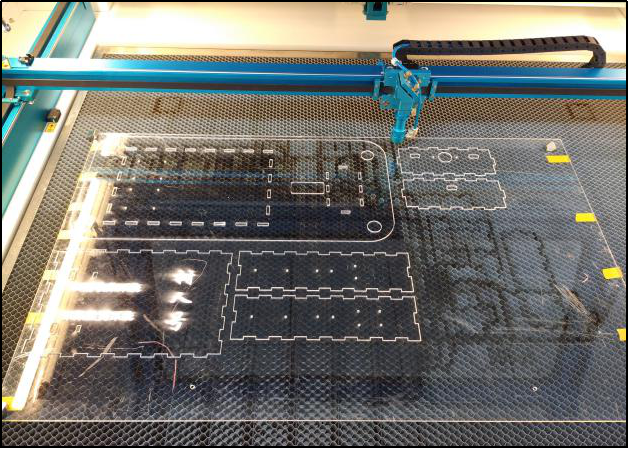
切割后的板材
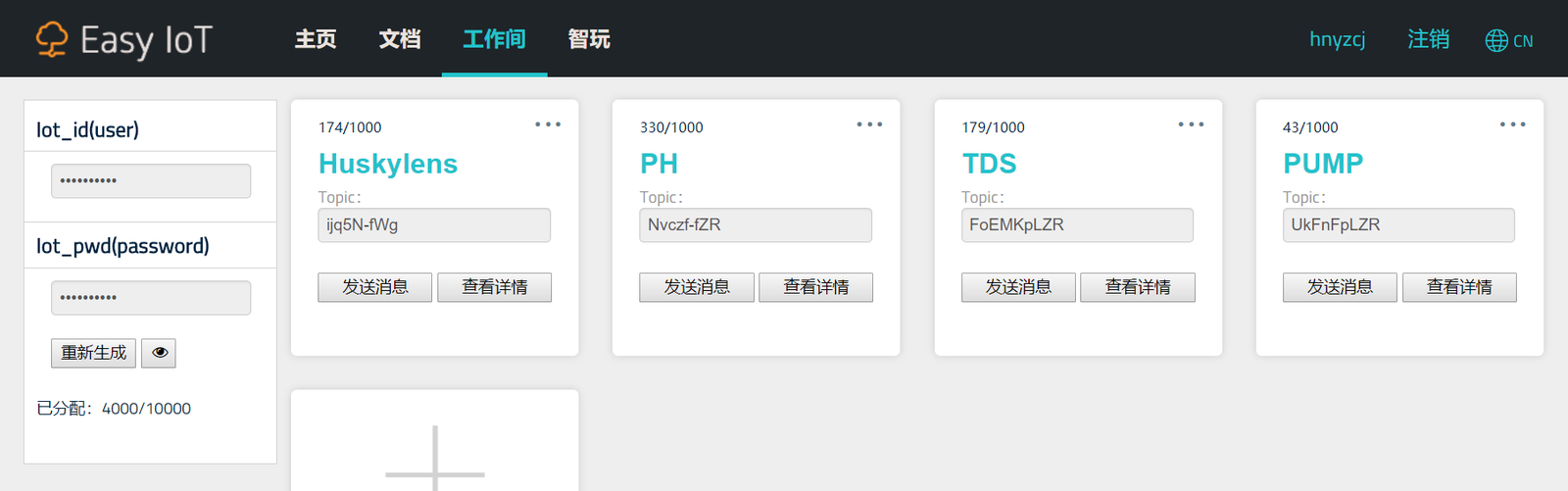
【注册物联网】
登录EasyIoT物联网平台(http://iot.dfrobot.com.cn/)完成用户注册及设备添加,这里不再赘述过程。Huskylens用于记录是否识别到水体内的垃圾、PH用于记录水体内的PH值,TDS用于记录水体内的TDS值,PUMP用于作为采集水样的控制开关。同时需要记录Iot_id、Iot_pwd处的值,后续编写程序中会使用到。
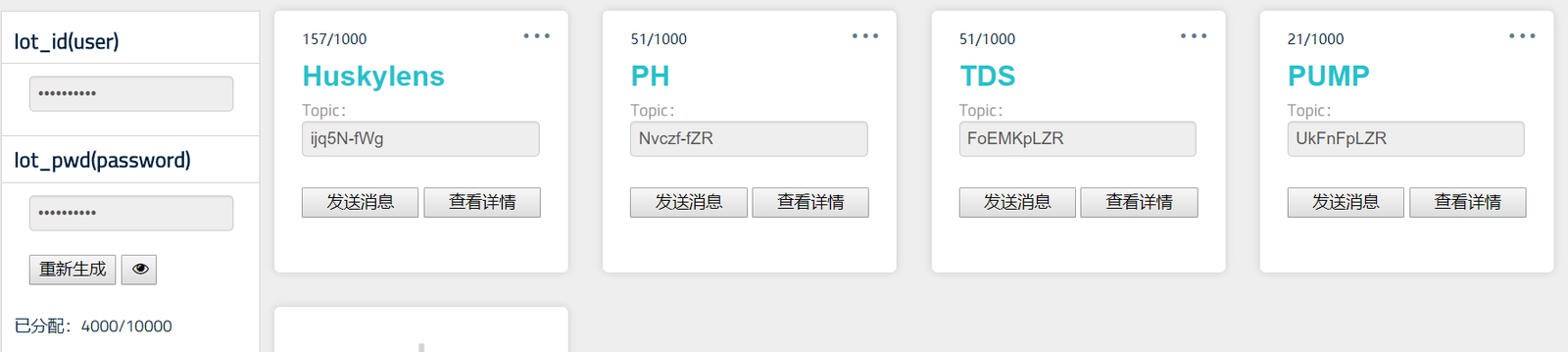
物联网设置
【相关设置】
(1)编程环境部署
程序编写使用的是Mind+V1.6.2,目前还未发布,其提供的下载地址为:百度网盘链接(https://pan.baidu.com/s/1_Ij7VMsBO3v8FpXcsKTXYQ,提取码:uehm)。其中本次程序编写涉及到的硬件有Microbit 、Huskylens、物联网模块、PH、TDS,因此在编写程序前先将这些拓展指令模块添加上,如图12所示。

模块添加
第一步:添加Micro:bit控制器 鼠标点击拓展按钮,切换“主控板”页面,如下图13处,添加Micro:bit。

添加Micro:bit
第二步:添加Huskylens、PH、TDS 鼠标点击拓展按钮,切换“传感器”页面,如下图14,添加Huskylens。

添加MU视觉识别传感器
第三步:添加OBLOGQ物联网模块 鼠标点击拓展按钮,切换“通讯模块”页面,如下图15,添加OBLOGQ物联网模块。

添加OBLOGQ物联网模块
第四步:添加蠕动泵模块 鼠标点击执行器,切换“执行器”页面,如下图16所示,添加蠕动泵模块。

添加蠕动泵
(2)Huskylens设置
拨动“功能按键”,至屏幕顶部为“物体追踪”选项,将物体放入屏幕框中,按下“学习按键”不松开,录入人脸的各个角度后,再松开按键,完成一个人脸信息的学习。当摄像范围内出现学习过的人脸时,显示蓝色框,并有“物体:ID1”"字样,表明识别成功如图17所示。上述操作后,我们就完成了物体追踪操作。

学习识别物体
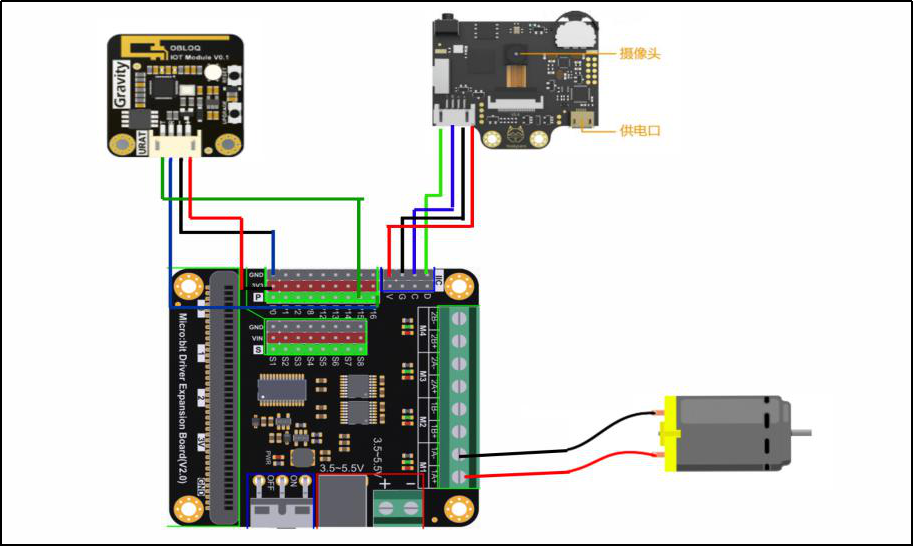
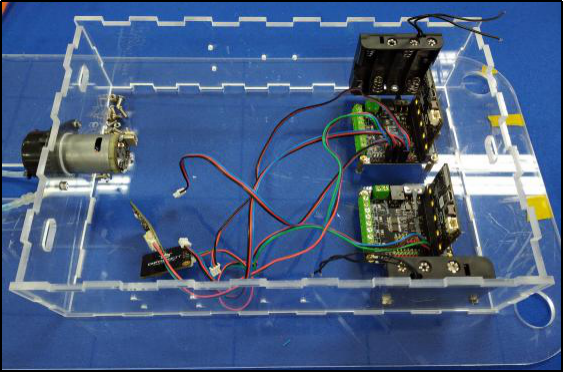
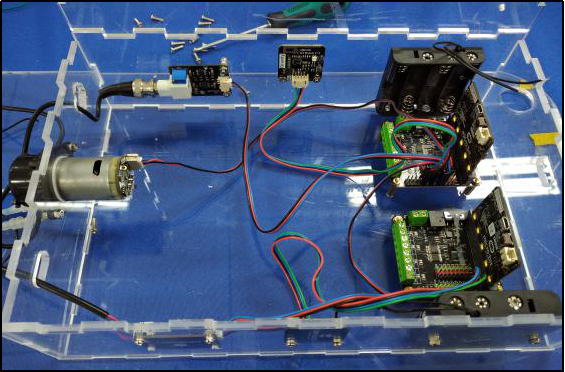
【电路连线】
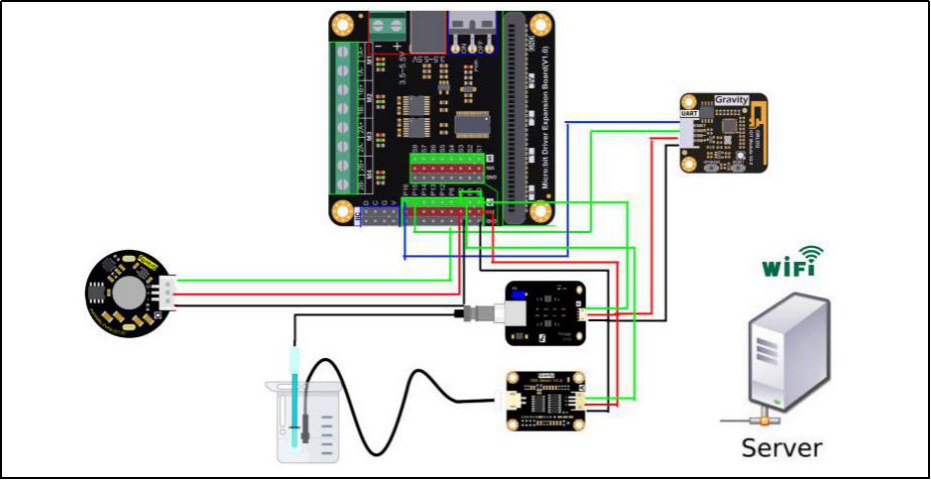
采集监测系统电路连线
识别清理系统电路连线
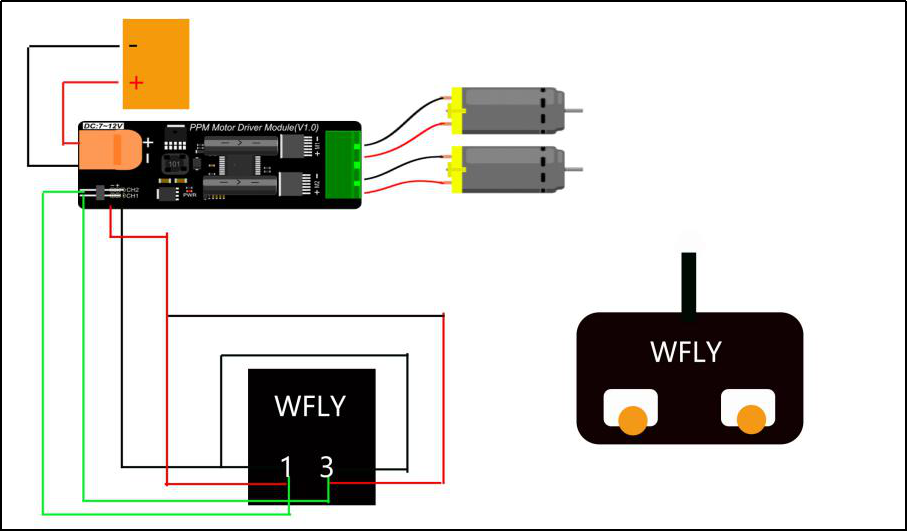
动力系统连线
【代码编写】
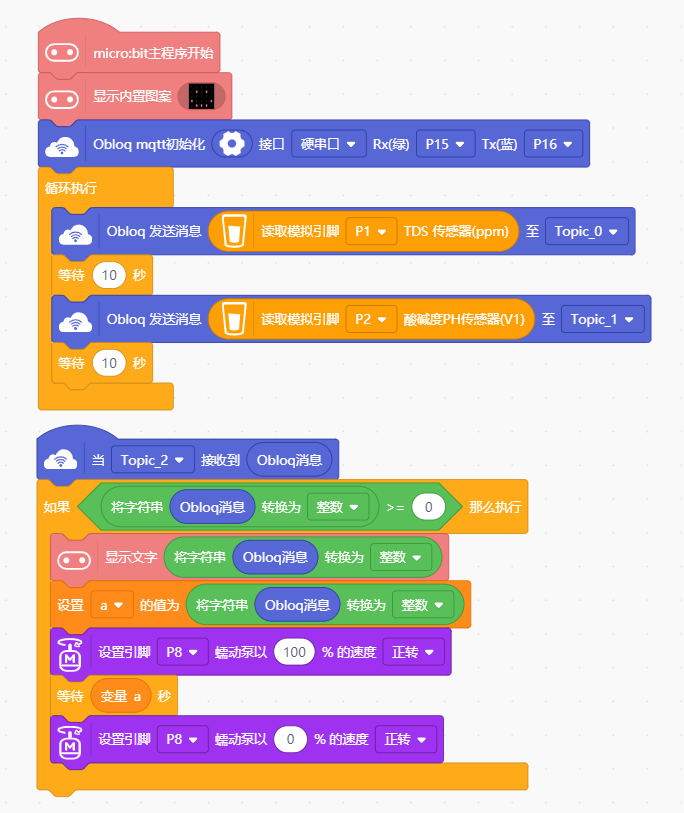
采样监测程序
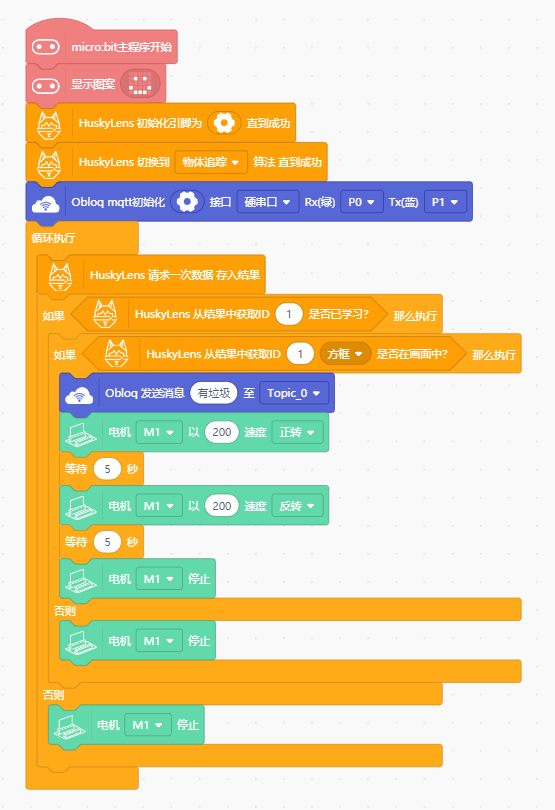
识别清理程序
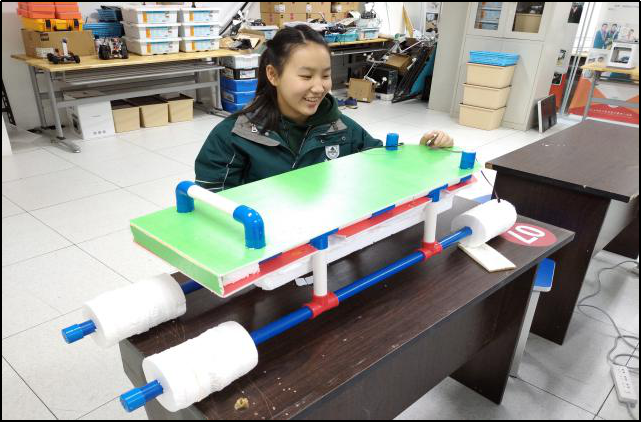
【设备组装】
(1)船体结构拼装:
第一步:用PVC管专用剪刀,切割出合适长度的PVC管
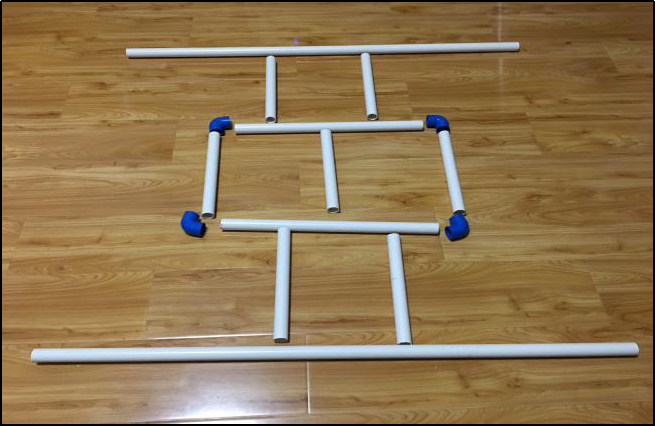
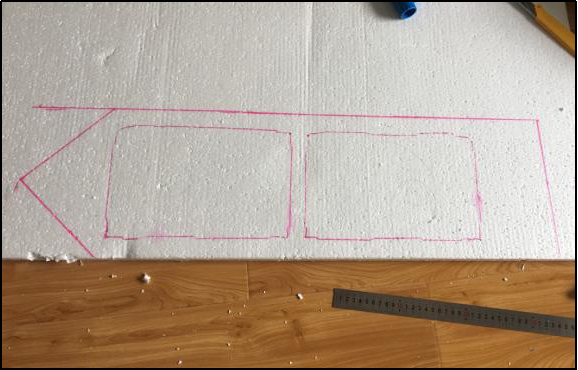
第二步:在泡沫上绘制船体大致轮廓。
第三步:用三通及PVC管搭建船体骨架。
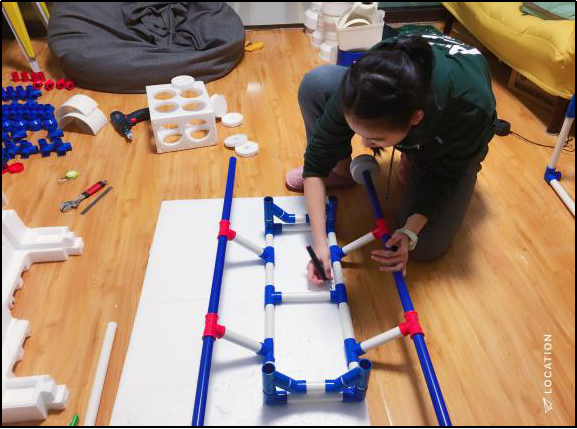
第四步:用圆形钻头切割出圆形的泡沫。

第五步:将泡沫穿在左右船舷的PVC管上。

第六步:船体安装效果。
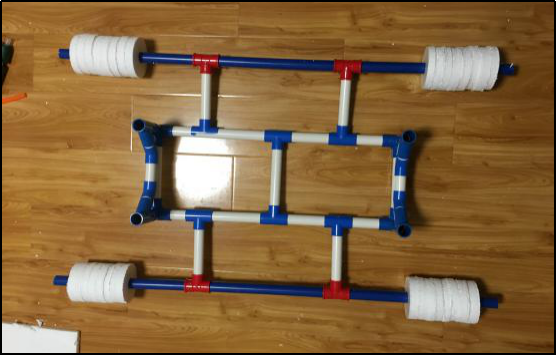
第七步:给船体安装泡沫。
第八步:用KT板外围粘贴美化窗体。

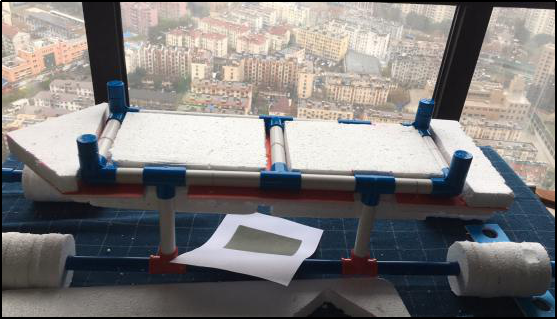
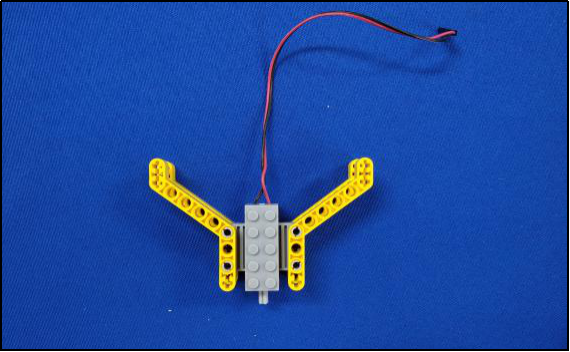
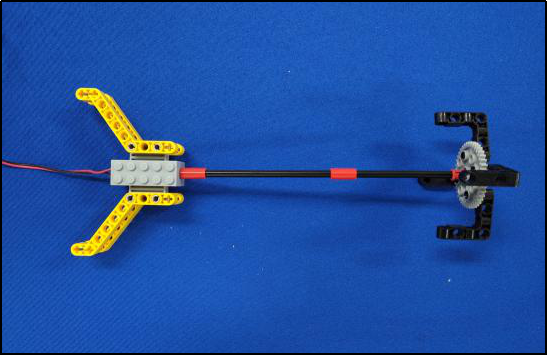
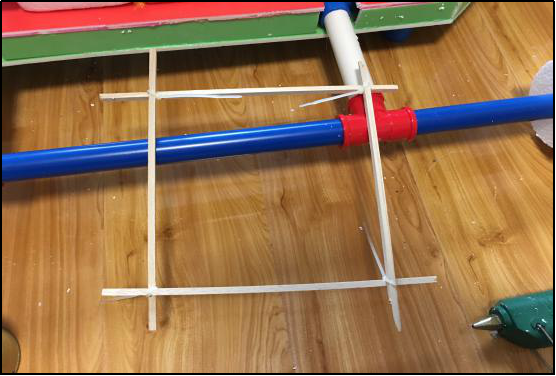
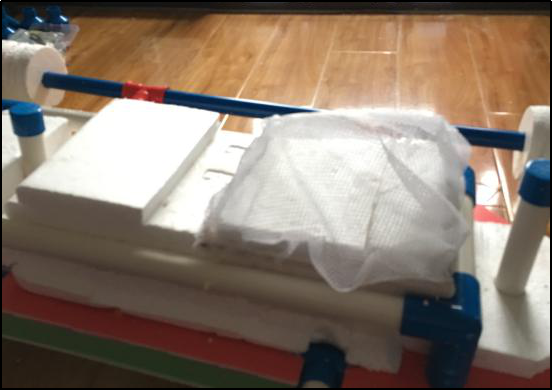
(2)清理机构
清理机构包括搅动装置和垃圾滤网两部分,搅动装置是为了让水形成旋流,让垃圾流动到滤网处。搅动装置的为了节省时间,我们用LEGO搭建了一个结构。

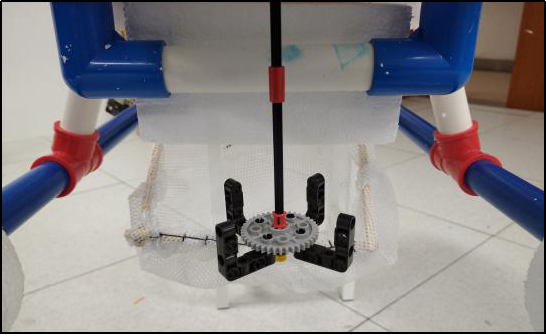
用竹签和扎带及网布组成一个垃圾滤网。

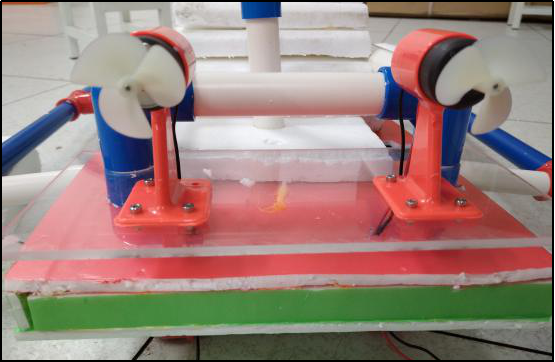
(3)动力电机
第一步:将两路水下电机安装到切割好的亚格力板上。

第二步:将亚格力板套装船体上,并用弯头固定。
(4)安装甲板结构
第一步:安装蠕动泵。
第二步:安装电池及主控。
第三步:安装物联网模块及PH传感器。
第四步:安装物联网模块及TDS传感器。

第五步:将PH、TDS传感器监测端穿孔到船体下。
第六步:安装动力系统并穿线。

第七步:安装调整HUSKYLENS和MU视觉识别传感器位置。

步骤4 项目展示
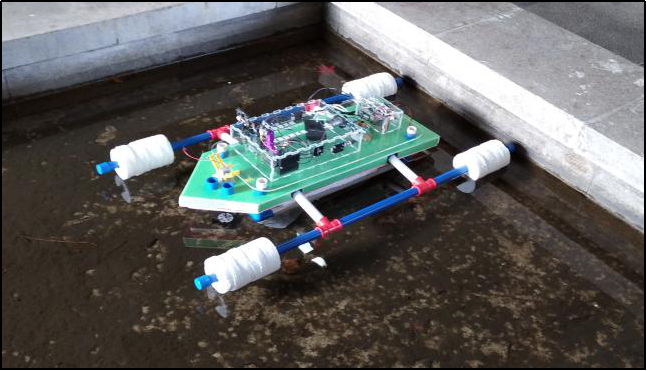
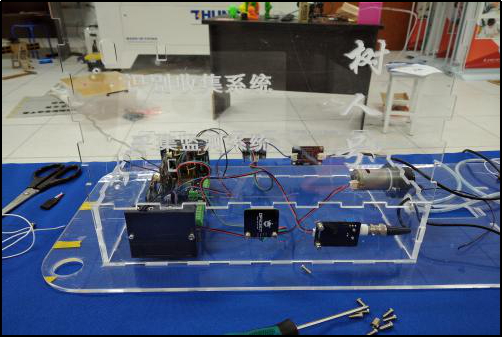
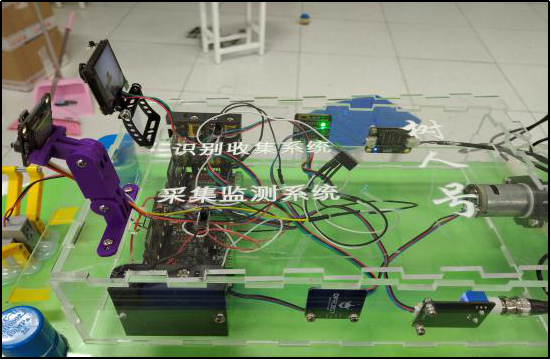
【作品展示】

【训练识别垃圾】

【监测水质指标】

【实地检测】

三汊河河口闸下游

长江江面


步骤5 项目总结
本项目实施后,对于我们水质监测社团帮助非常大,可以正真意义上的完成了水体的采样和监测,同时也在一定程度上完成了水体内垃圾的清理(清理机构将在后续进一步改进和加强)。后续我们树人水质社团将在南京市发起保护水资源环境,带动周边地域水资源生态环境的全面改善的公益活动,号召更多的中学生参与到水质监测和保护中来,改善周边学校居民居住环境,保护水源。
【经验和总结】
1.水体监测:我们走访了水体监测站,发现我们监测的数据指标不够全面(传感器的限制)
2.动力装置:虽然我们这次我们已经使用了大功率的水下电机,但是在实际应用中,还是显得动力不足,后续更换。
3.垃圾清理:由于时间紧,设计上存在了一下漏洞,这个垃圾清理的结构在理论上是合适的,但是在实际应用中,效果并不理想。
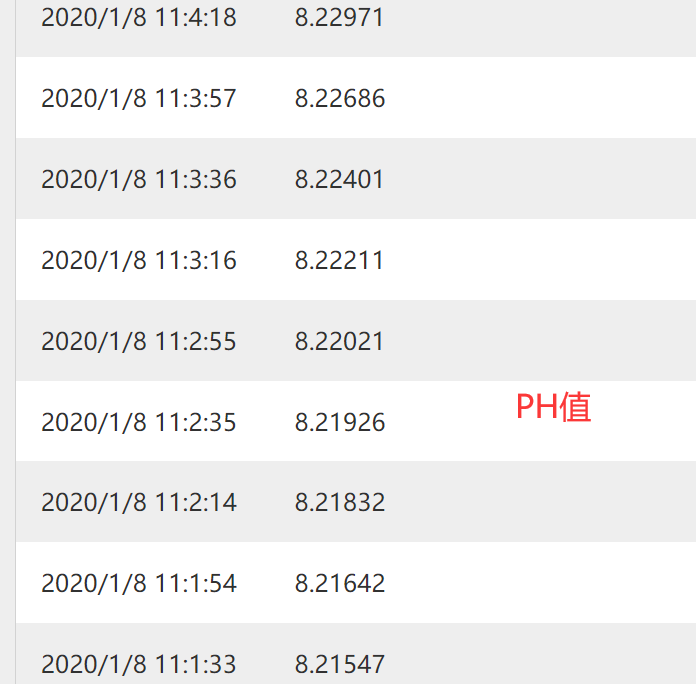
步骤6 拓展延伸
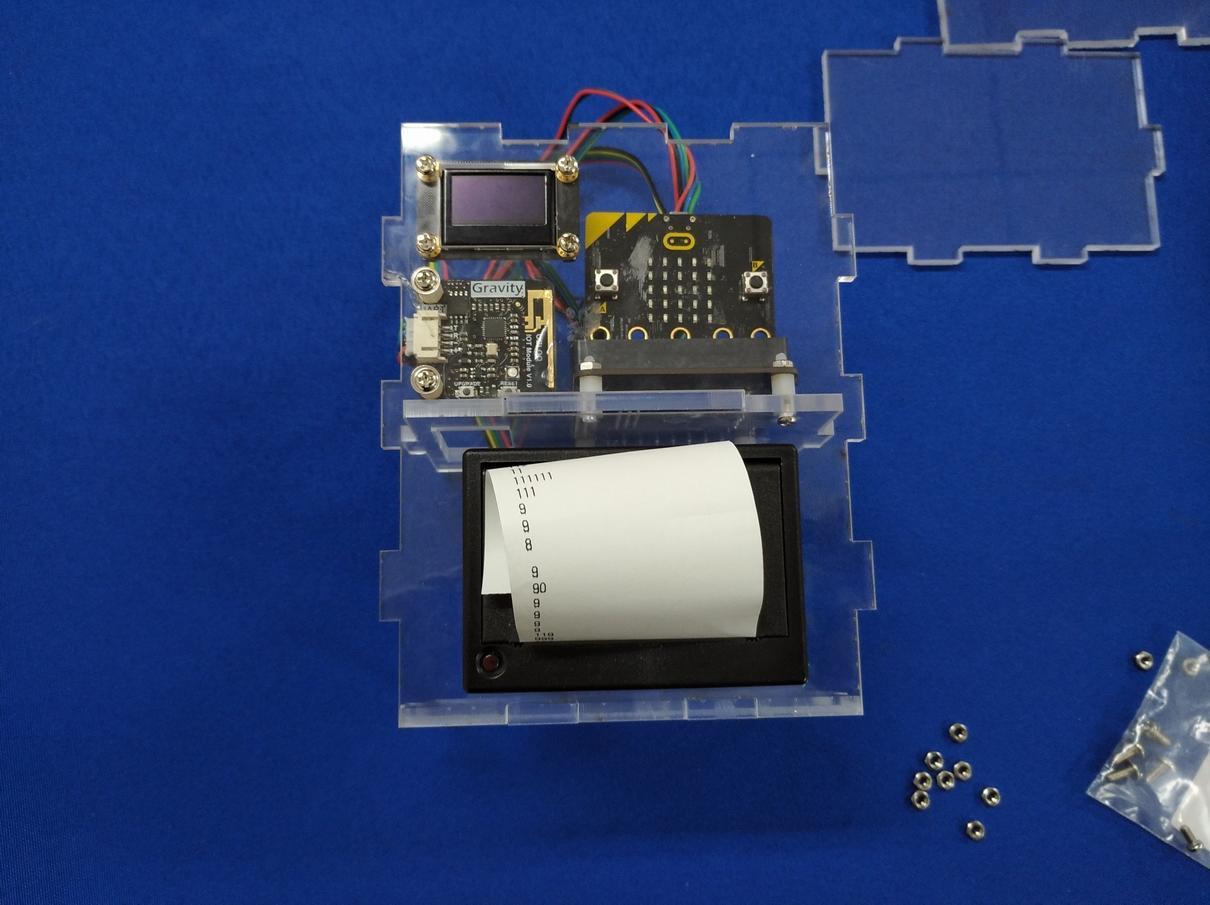
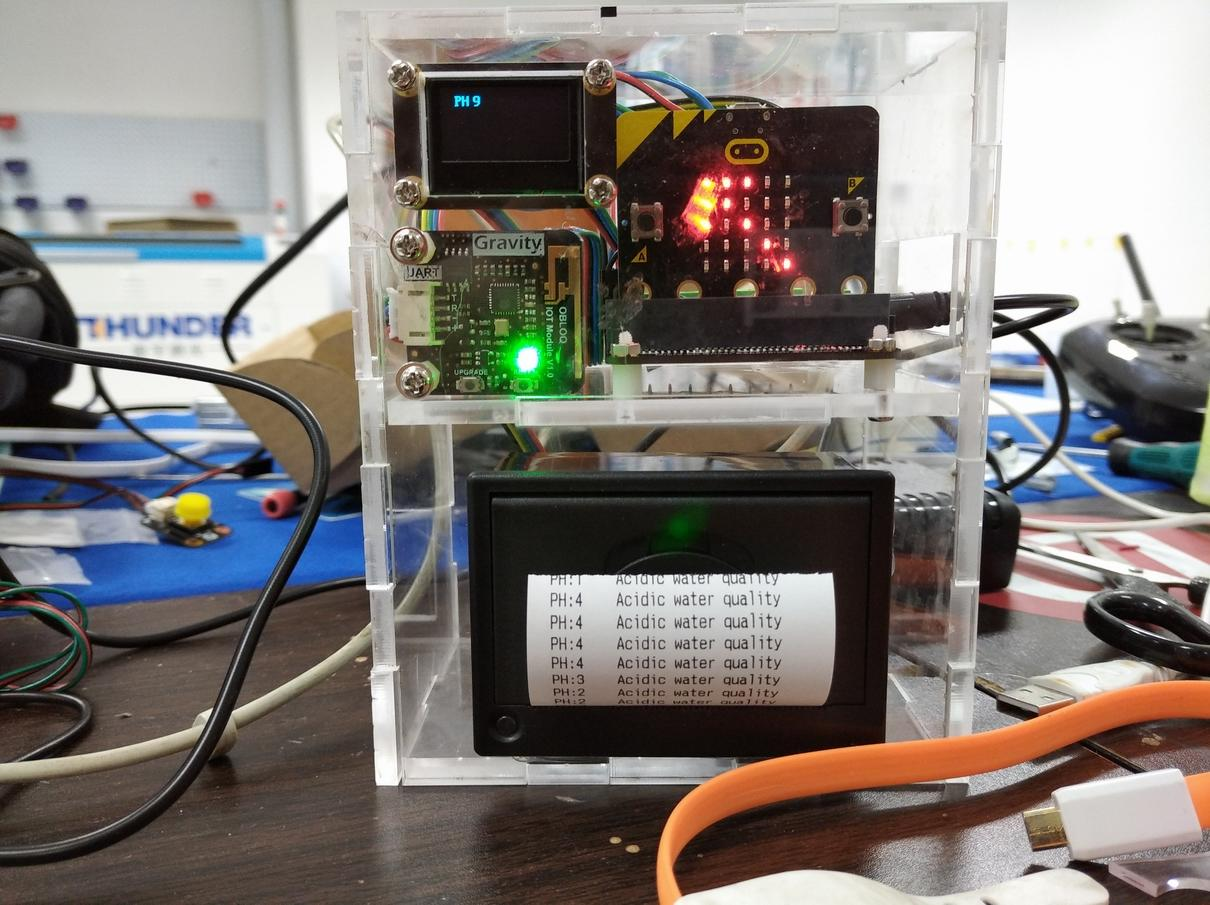
虽然之前系统中已经为水质的ph、tds数据值上传到EASYiot上,但是对于远端而言没有响应的提醒装置。为此我们使用热敏打印机,当PH值出现异常时,实时打印出水质的PH值数据。具体设计制作如下所示。
下水的日子 2020年1月8日天气晴朗,带着树人号准备进入长江和秦淮河采集水质数据
步骤7 实地探究采集数据
我们首先去的是长江岸边,但是非常不幸的是我们即将到岸边的时候被困岸边滩涂的淤泥里,费劲九牛二虎之力才得以脱身。也让我深深的感受到了那些科学家做实地数据采集的不容易。这可真不像在实验室里做个实验那么简单。

调试设备

有点不放心,栓跟绳子,怕它跑了

来到秦淮河边

接通电源
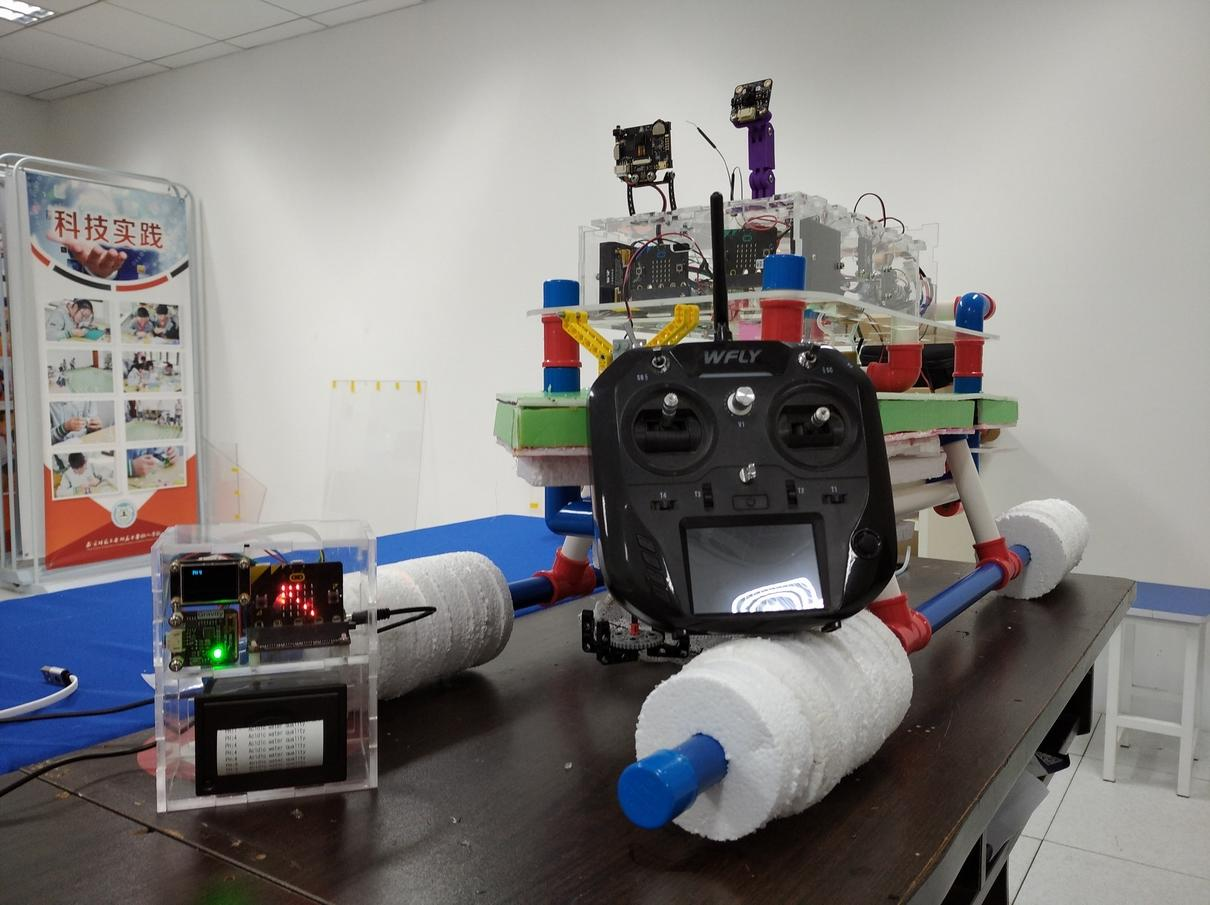
丢在实验室里的数据打印终端
队伍名称 突破未来-示例队伍 参赛组别 小学
参赛学生 李四 上海市希望小学 张三 上海市希望小学1
指导老师
王五 上海市希望小学